

current projects




Experiments and Simulations to Facilitate Data-driven and Machine Learning Hydrodynamic Models
High Speed Craft (HSC) is a vessel class characterized by its ability to reach high speeds through planing. They are widely used within the Navy, from small boats without a permanent crew to the Freedom-Class Littoral Combat Ships. The performance of HSC is determined by their resistance, running position, acceleration in waves, ability to handle hull slamming pressure, maneuverability, and operability. These are governed by hydrodynamic phenomena that are not trivial to predict due to their dynamic nature. With the progression of data science and analytics, Machine Learning (ML) and Artificial Intelligence (AI) are becoming essential elements in the design and operation of naval craft, paving the way for innovations in marine vehicle design and operation. The goal is to develop a data-driven approach for building a reduced-order predictive hydrodynamic ML model for HSC in normal operating conditions and extreme edge cases. The success of the development of this machine learning technique for predicting the performance of High-Speed Crafts relies on access to high quality accurate data. Targeted novel simulations and experiments will be performed to obtain the hydrodynamic and forcing coefficients needed to solve a 6-Degree of Freedom (6-DoF) Fossen-type equation. Our 8 ft free running scaled model of the Generic Prismatic Planing Hull (GPPH) which is an ideal experimental platform for large scale data generation of HSC hydrodynamic performance will be used. The free running model is self-propelled and equipped with a data acquisition system (DAQ) to gather hydrodynamic information. The in-situ settings provide a more realistic testing environment which is a diverse mix of current, wave, and wind conditions. An environmental monitoring system comprised of four commercial wave buoys and a stereovision system can be employed to measure the sea state. Anticipated outcomes include:
• A step towards digitalization of the design spiral and real-time operational feedback for vessel operators through the ML model.
• New and enhanced methodologies for experimental data collection for ocean free-running models.
• A centralized data repository to store both experimental and numerical data related to the performance of HSC, which will serve as a valuable resource for both current and future research.
These outcomes will significantly enhance our understanding of the hydrodynamic performance of HSC in various sea conditions during advanced and common maneuvers. The data and models developed through this project will facilitate a digitalization shift in ship design and operation, and ultimately enhance the safety and operability of fast planing vessels.
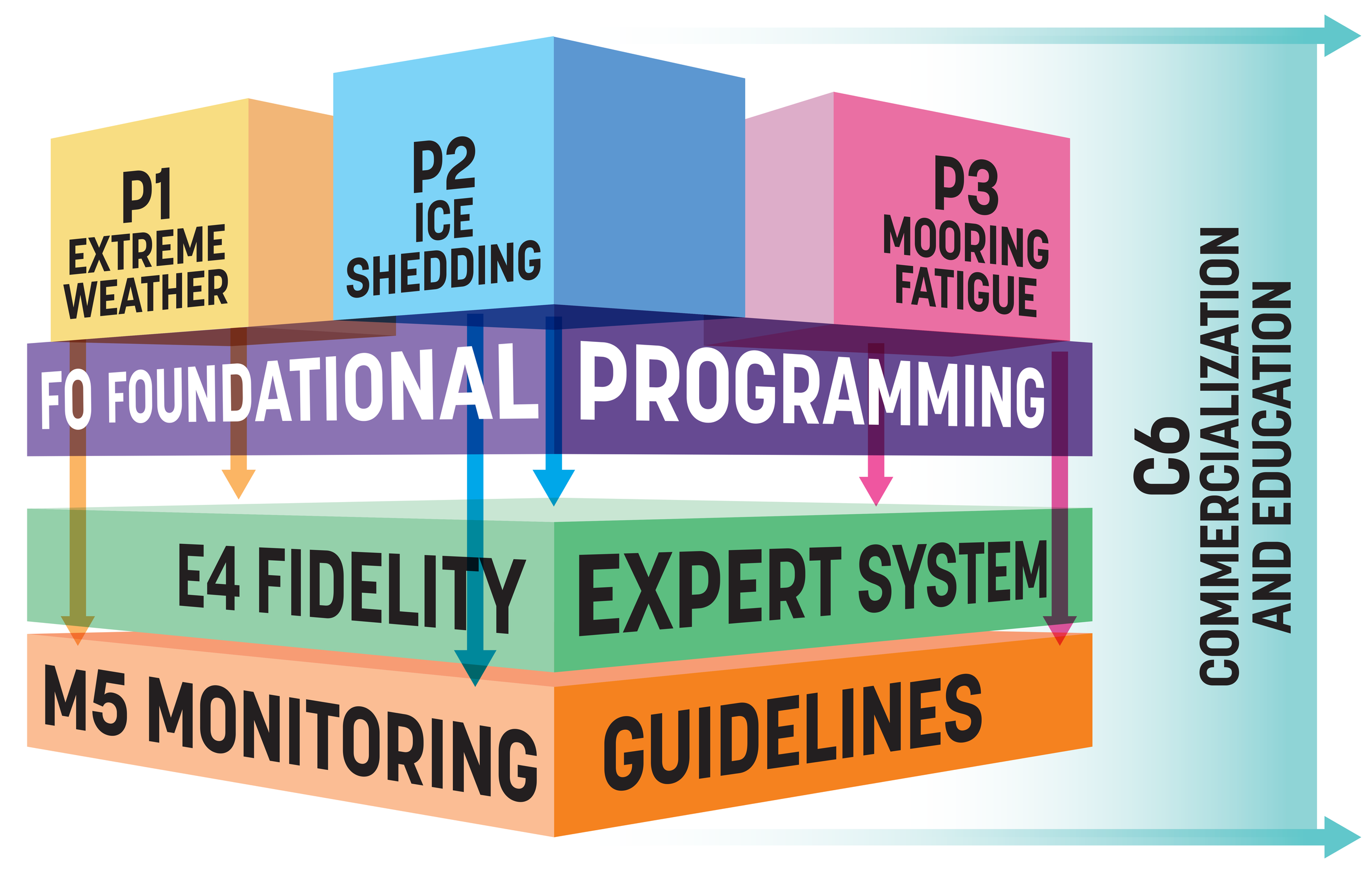
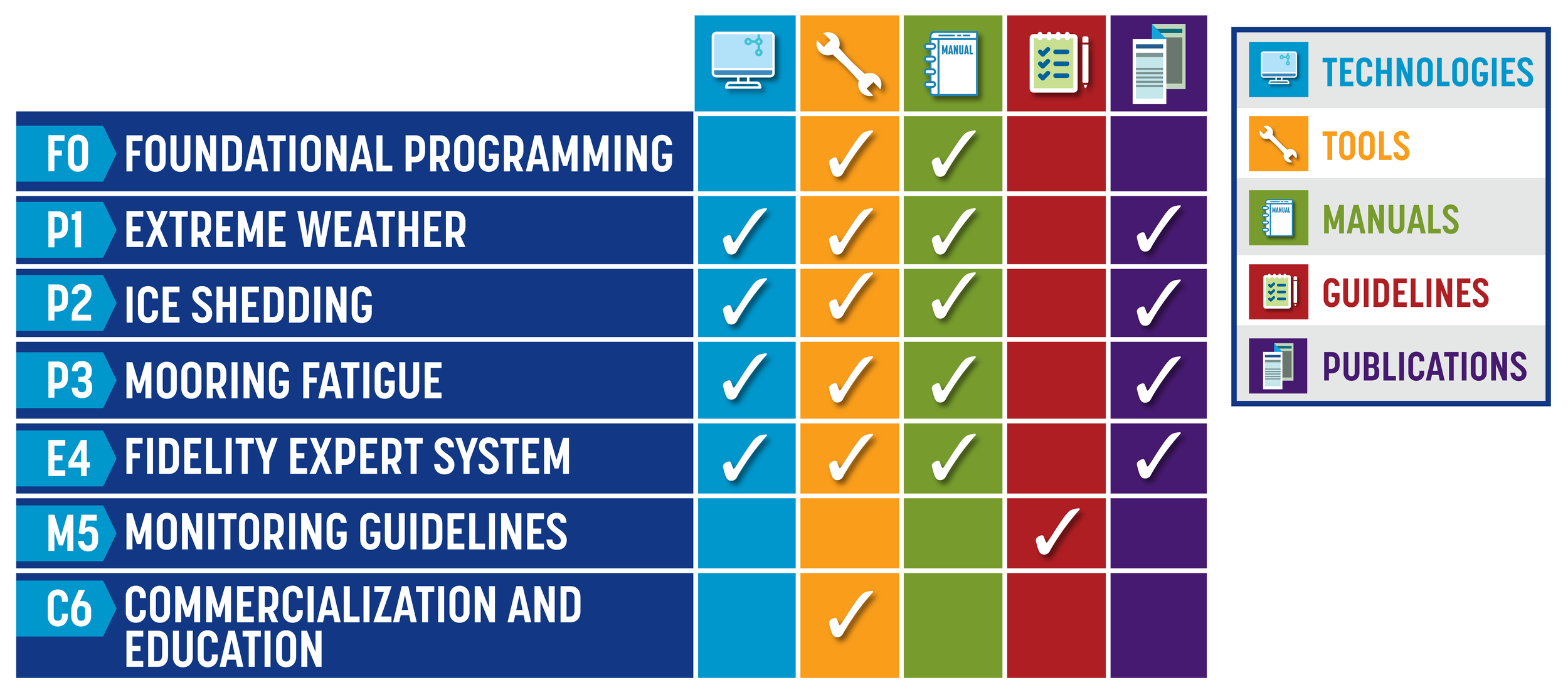
SAFE-WIND: Safety Additions to FAST for Extreme Weather, Icing, and Nonlinear Dynamics
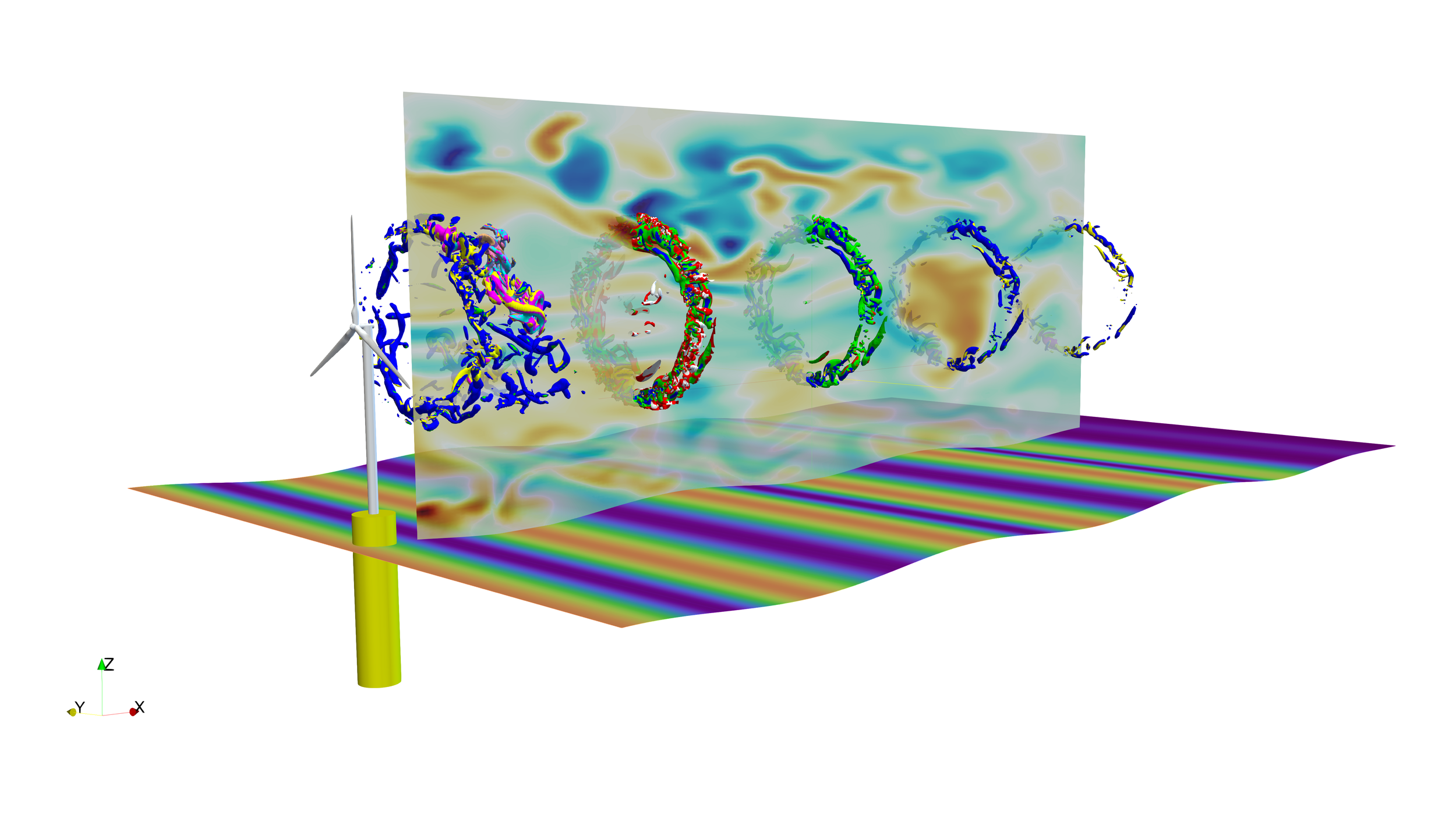
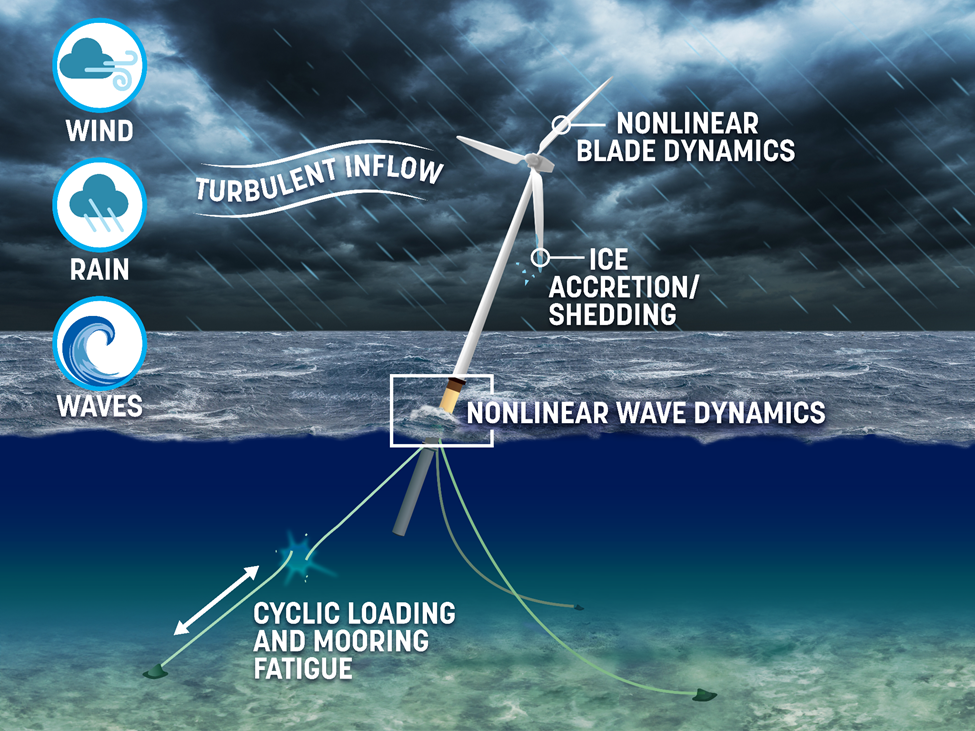
Offshore wind farms will be a cornerstone of the “Blue Economy.” While there are a range of tools available for prototyping wind farms, they are almost exclusively focused on overall design efficiency rather than safety. Due to their primitive numerical schemes current tools are unable to assess designs for many potential hazards. Hazards that can result in a risk to life and/or property include: extreme weather events which result in breaking waves, ice accretion on turbine blades, and mooring fatigue from vortex-induced-vibration. The goal of the SAFE WIND project is to enable safety to be an active consideration during all stages of the design process of an offshore wind farm. To this end, the primary deliverable of the project will be a comprehensive suite of safety-centric physics extensions for the OpenFAST framework. OpenFAST is currently the leading framework for offshore whole-turbine and wind-farm simulation and is widely used for design evaluation.
To realize these safety extensions, OpenFAST will be coupled with the high-fidelity Computational Fluid Dynamics (CFD) tool OpenFOAM. OpenFOAM is a leading open source software for CFD, and is suitable for simulating unsteady flows in the vicinity of complex and deforming geometries. Our approach seamlessly integrates this capability into OpenFAST. This will ensure that industrial practitioners do not need to invest time and resources learning a new tool. Given that these new high-fidelity models are more computationally expensive than those currently employed by OpenFAST, we will develop a data-derived “fidelity expert system.” The role of this system is to automatically determine the level of fidelity required at each stage of the design process. For example, a wind farm configuration that is discarded after it was deemed to be inefficient doesn’t have to be evaluated for safety. The role of the expert system is to ensure that expensive safety-centric simulations are performed as soon in the design process as practical, but not so early as to potentially waste computational resources on ineffective configurations.
To further enhance safety, predictive tools should be combined with real-time asset monitoring. Therefore, the analyses of off-design loads performed in the SAFE-WIND project will also be used to identify areas where real-time structural monitoring will be most effective in predicting turbine failures. This will result in a set of guidelines for sensor placement.







SMART-SEA: Safe Maneuvering using Augmented Radar Tracking for Sea-based Entity Avoidance
Collisions and near-misses between marine vessels and stationary offshore platforms are an increasingly prevalent problem. Such collisions can result in both property damage and, in extreme cases, loss of life. Unlike in commercial aviation, which since the mid-1990s have employed both Airborne and Terrain Collision Avoidance Systems (ACAS and TCAS, respectively), no such system exists for marine vessels. The causes of these collisions are varied but include: impaired visibility due to poor weather conditions and/or sea state, hazardous entities not correctly identifying themselves, and distracted vessel operators. The goal of this project is to substantially reduce the likelihood of such collisions in all three of these situations.
The primary deliverable of the SMART SEA project will be an all-weather hazard avoidance “decision dashboard” that will alert mariners when their vessel is liable to collide with an offshore platform, and provide suggestions for remedial action. The alerts will initially start out as visual warnings, and will escalate to auditory cues if necessary. Suggestions for remedial actions will take the form of safe course corrections which can be made to avoid the hazard. All suggestions will take into account the maneuvering capabilities of the vessel it is installed on. These capabilities will be inferred automatically through a combination of a baseline “minimum maneuvering capability” model, a CFD derived model, and an observed capability model learned through monitoring the motion of the ship in real-time. Moreover, the dashboard will automatically classify hazards, e.g. “offshore platform” or “wind farm” and use this information to determine a suitable exclusion zone. Our dashboard will run on off-the-shelf hardware and will be installable on the bridge. The primary data source for the dashboard will be the ship's onboard radar. Using radar data enables the dashboard to function in all weather conditions and sea states, including in poor visibility where collisions are most likely to occur. The radar data will be augmented with AIS (Automatic Identification System) and ENC (Electronic Navigational Charts) data where available. The dashboard itself will not require internet access or regular maintenance. Finally, the avoidance strategies inherent in our decision dashboard will be mariner sourced. The project includes focus group meetings with captains who have many years experience maneuvering a range of vessels. To ensure that the system is fit-for-purpose for the offshore industry, an Industrial Advisory Board has been assembled and will be consulted at key stages of the project.

Fluid Interaction Study: Hydrodynamic Robot (FISHR)
The Fluid Interaction Study Hydrodynamic Robot (FISHR) is a bioinspired robotic fish platform developed to investigate the hydrodynamics, control, and sensing mechanisms of aquatic locomotion. Inspired by the efficient swimming strategies of pelagic fish species, FISHR employs a thunniform swimming mode using a wire-driven compliant tail capable of generating realistic fish-like body kinematics. The platform provides a versatile experimental tool for studying bioinspired propulsion, maneuvering, and flow interactions in controlled laboratory environments.
FISHR incorporates a modular sensing and control architecture designed to support semi-autonomous swimming and advanced hydrodynamic experimentation. The robot is equipped with a network of external pressure sensors embedded within the body to function as an artificial lateral line system, enabling measurement of local pressure distributions and environmental flow features. Additional onboard sensors, including an inertial measurement unit (IMU), provide information on vehicle orientation and motion. Together, these sensing systems support the development of biologically inspired control algorithms for depth regulation, maneuvering, and environmental awareness.
The platform features an actively driven caudal fin for propulsion and independently actuated pectoral fins for stability and depth control. Real-time processing and control are achieved through onboard microcontrollers that integrate sensor feedback with motion commands. This architecture enables closed-loop experimentation involving depth regulation, flow sensing, and adaptive swimming behaviors.
Current research utilizing FISHR focuses on understanding hydrodynamic interactions in complex flow environments, with particular emphasis on near-surface swimming where free-surface effects significantly alter vehicle performance and stability. The platform is also being used to investigate artificial lateral line sensing, bioinspired depth control, and multi-agent schooling interactions. By combining biologically inspired design principles with modern sensing and control technologies, FISHR serves as a testbed for advancing next-generation autonomous underwater vehicles and enhancing our understanding of aquatic locomotion.
WAVE RESOURCE ASSESSMENT AND FEASIBILITY STUDY FOR WAVE-POWERED DESALINATION IN EGYPT
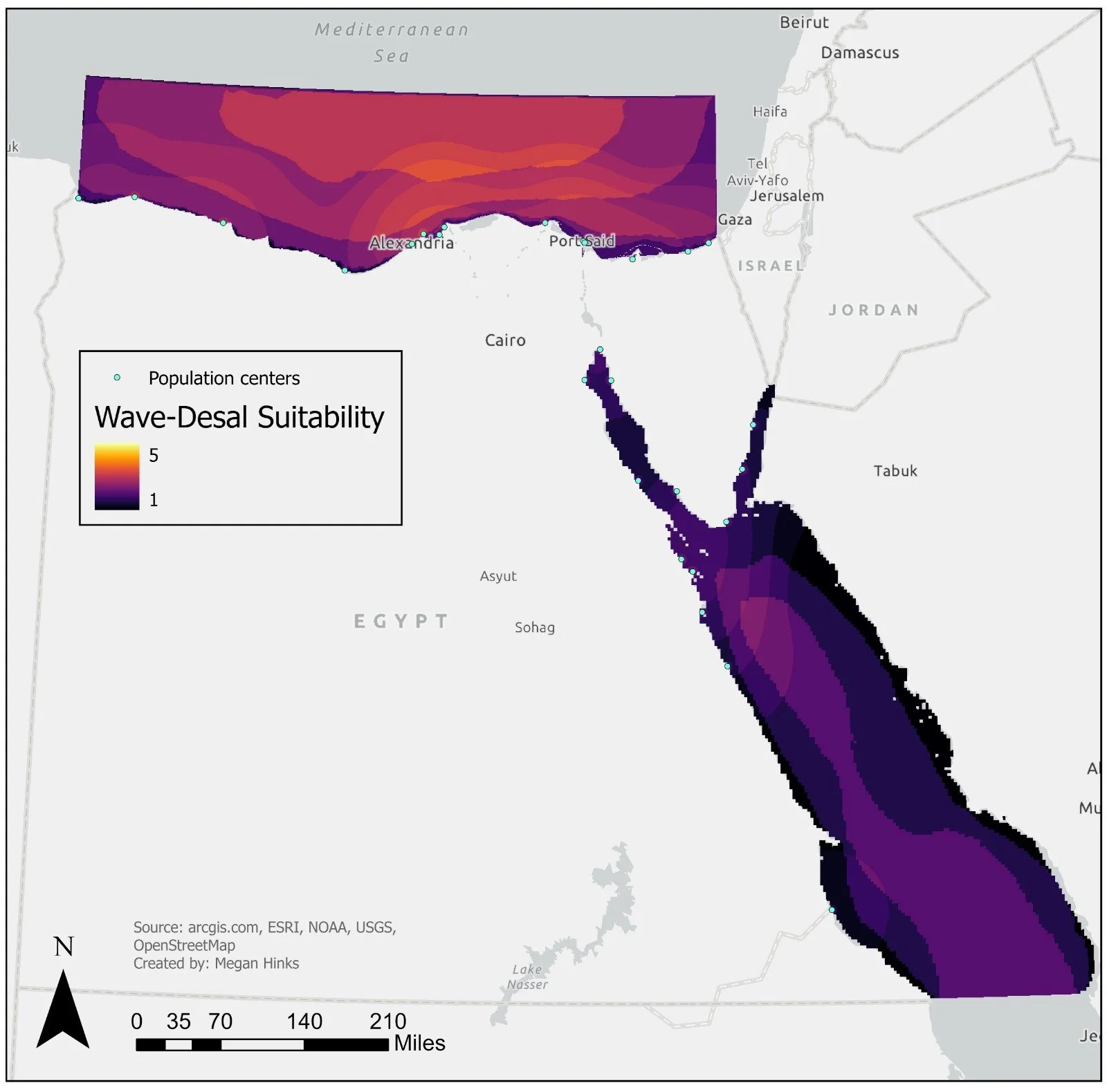
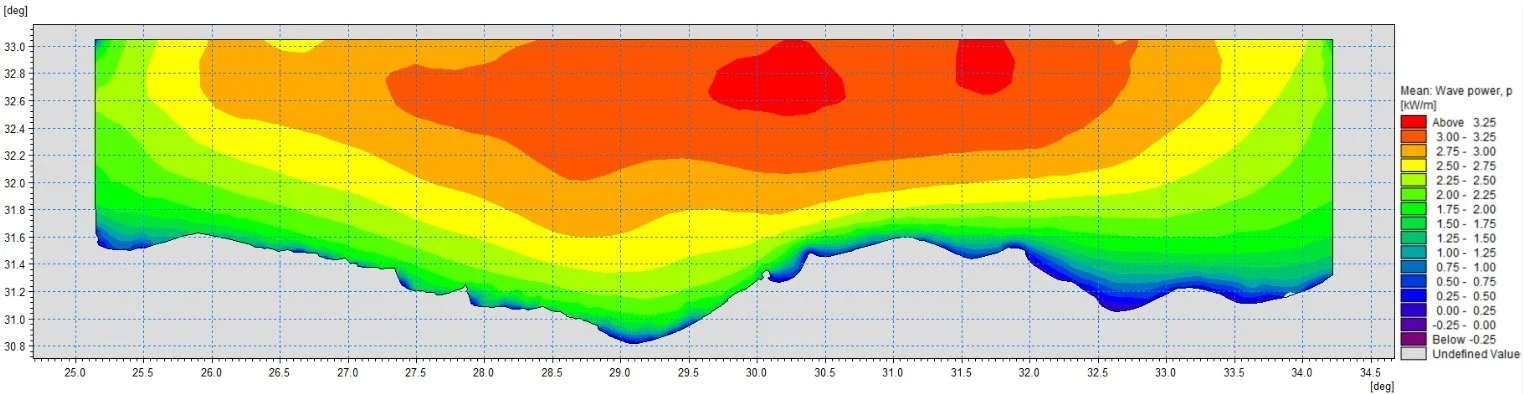
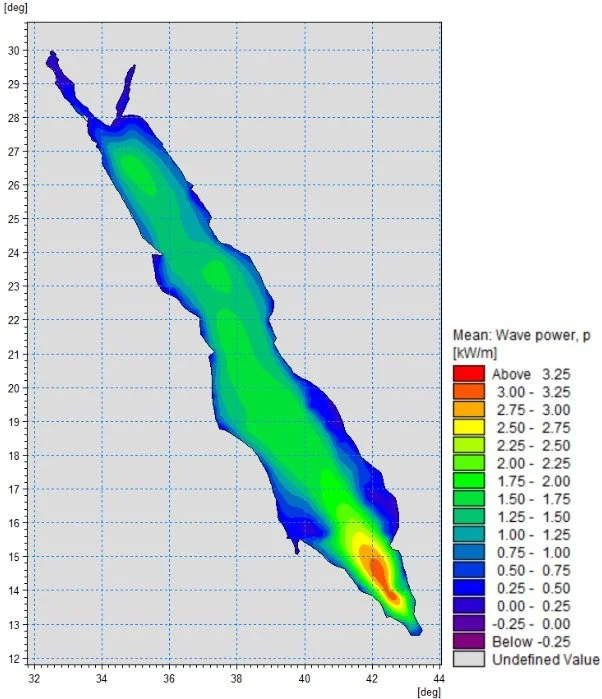
The Nile River spans across ten countries, where Egypt is the most downstream. Fixed water budgets were established to allocate water from the river and have become a significant source of geopolitical tension in the region. This limited supply is expected to be threatened even further when accounting for climate change and population growth. In response, diversifying and increasing Egypt’s water resources is of the utmost importance. Water and energy are inextricably linked with one another, and there is a growing field in researching and establishing this connection, defined as the Energy-Water Nexus. Large amounts of electricity are necessary for desalination processes, which have been historically fueled by fossil fuels. Further, areas with limited electrical grid connection also face problems with water scarcity. Desalination has been utilized to expand water resources around the world. Advancements in the technology include integration with renewable energy, which eliminates the electricity demand associated with desalination. In the case for membrane-based desalination processes such as reverse osmosis (RO), wave energy converters (WECs) have the potential to produce the pressure required to feed saltwater through the system to convert it to freshwater. Integrating WECs and RO desalination allows for advancements to be made in both sectors concurrently, creating opportunities for open-water analysis that is currently lacking in the field of wave energy. In addition, freshwater produced from wave-powered desalination has been found to be closer to market readiness than electricity from WECs.
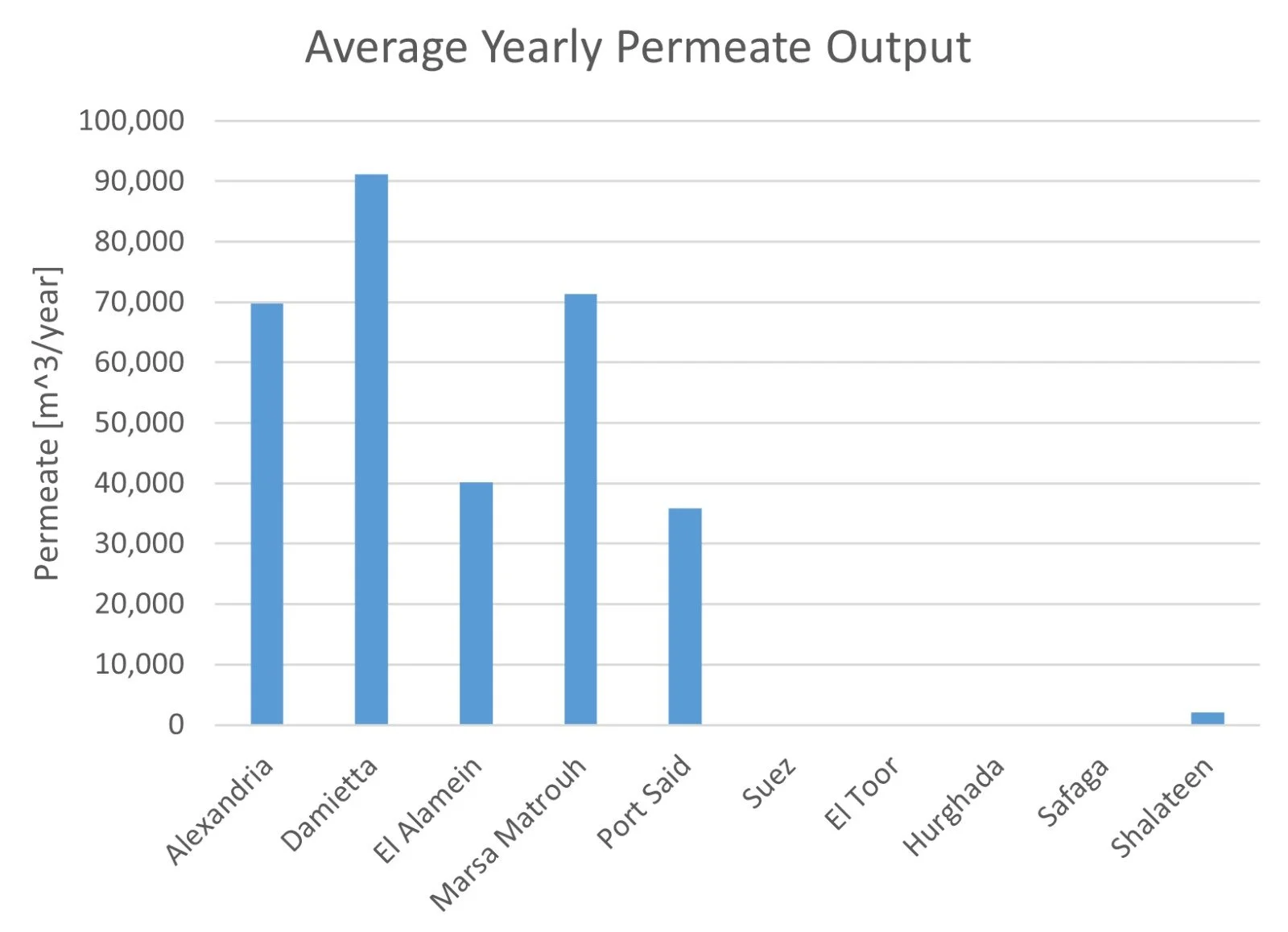
This research quantified the wave resource in Egypt through spectral wave modeling of the southeastern Mediterranean Sea and Red Sea using MIKE 21 Spectral Waves (SW) across 1 year from 2023 to 2024. This numerical modeling addressed significant knowledge gaps in assessing wave energy, wave-powered desalination capabilities in Egypt, and further offshore development in the future. The numerical wave model also provided discussions of seasonality in the wave climate of the southeastern Mediterranean Sea and Red Sea over the full year. This culminated in a feasibility study for a coupled oscillating surge wave energy converter (OSWEC) and RO desalination system and its implementation in Egypt. The wave resource produced by MIKE 21 SW for the Egyptian coasts of the Mediterranean and Red Seas were used as inputs for two additional measurements of feasibility: an ArcGIS suitability analysis and estimations for water production using the Wave Energy Converter SIMulator (WEC-Sim). The northern Egyptian coast between the Nile Delta and the Libyan border has been highlighted in the literature as a region with high wave power potential, which is supported by the results in this study. Three locations in this region were identified as optimal locations for wave-powered desalination due to their relative wave resource and subsequent estimated permeate outputs. The population centers most suitable for wave-powered desalination in Egypt were Alexandria, Damietta, and Marsa Matrouh. This framework provides a preliminary discussion of feasibility for wave-powered desalination integration in Egypt and identifies additional metrics to assess the overall potential for the technology.
Generative AI for Tropical-Cyclones Super Resolution
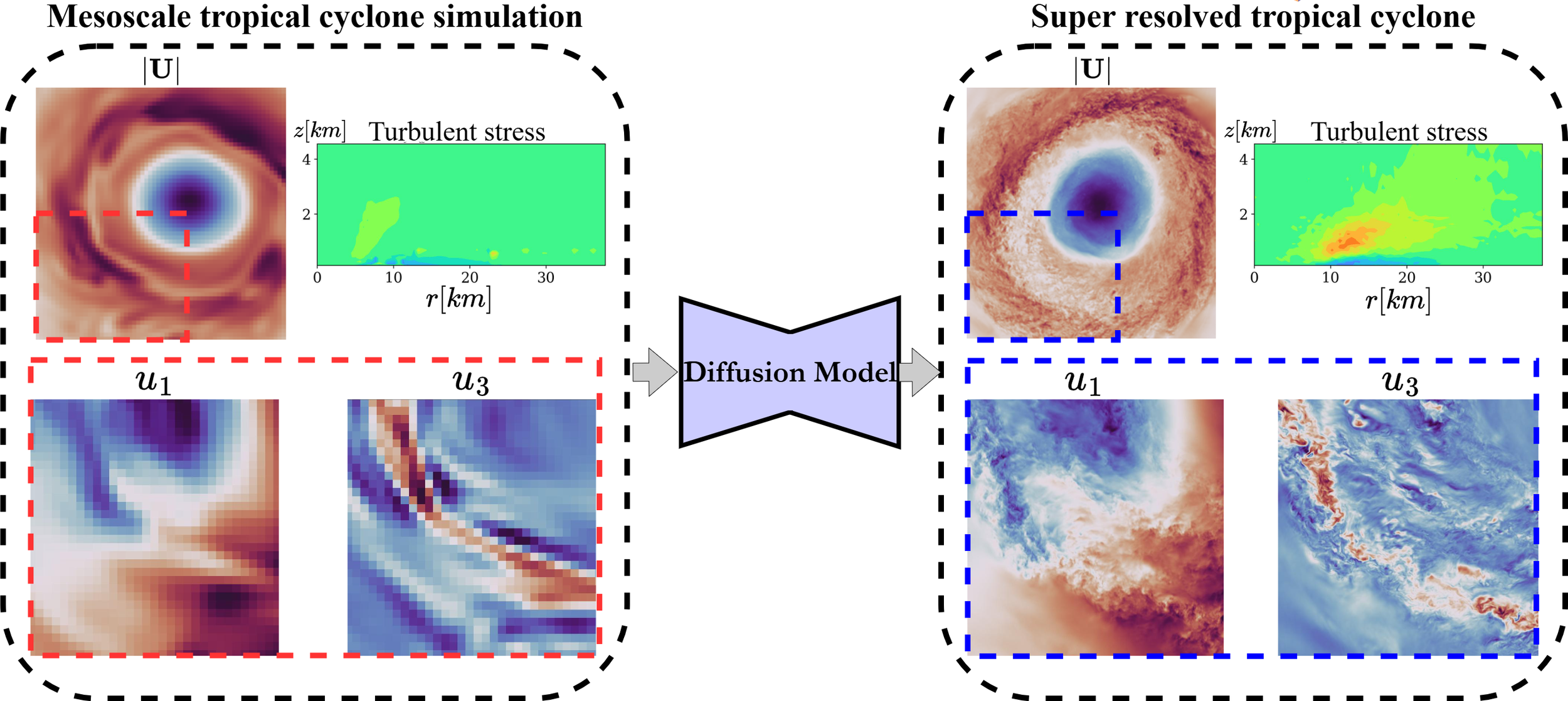
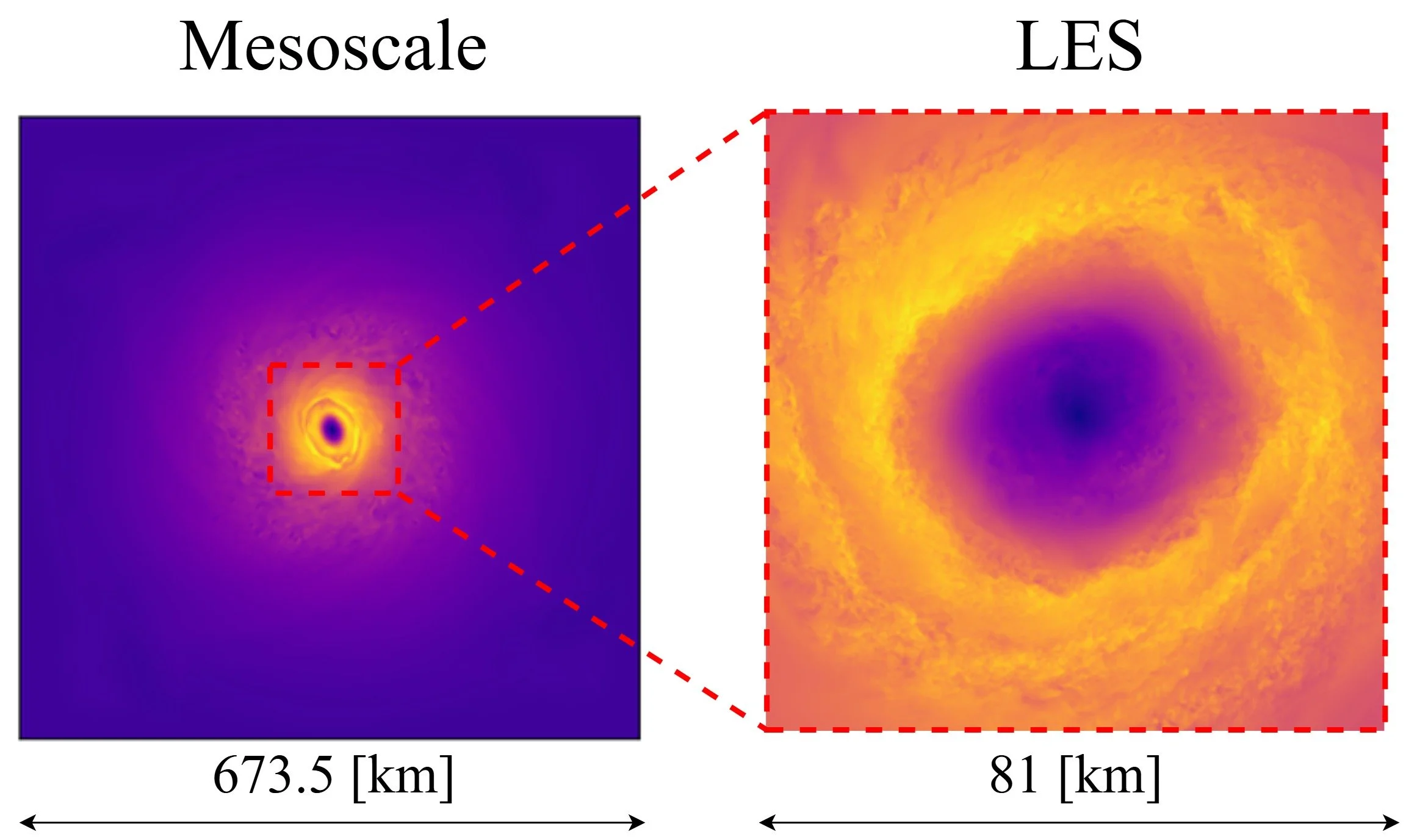
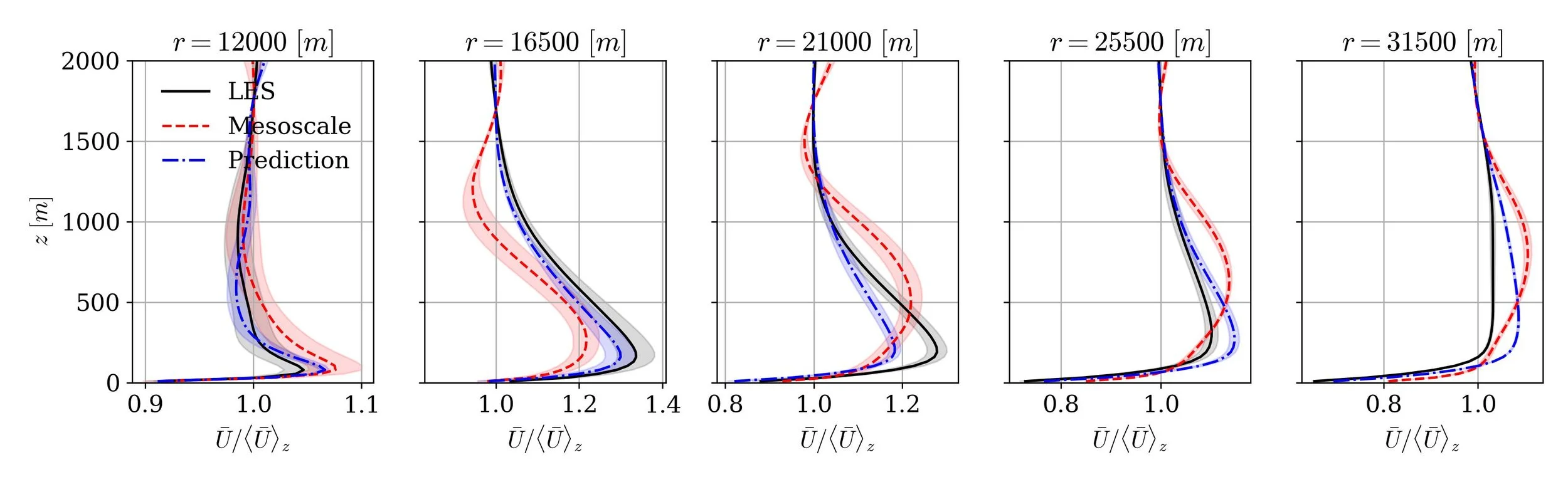
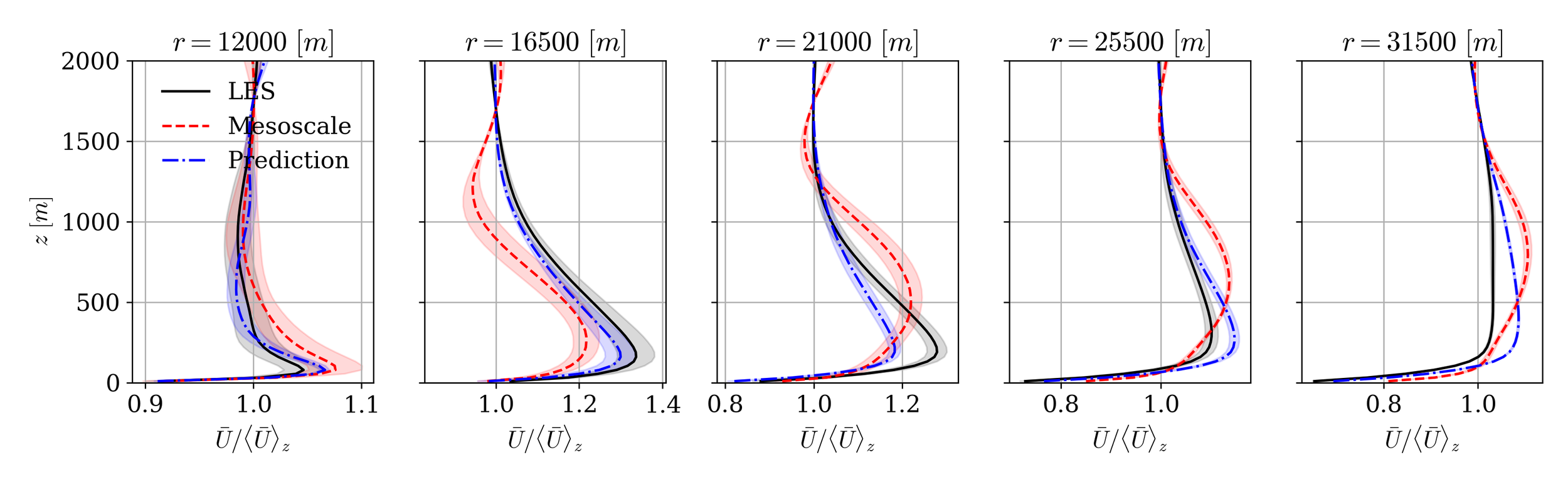
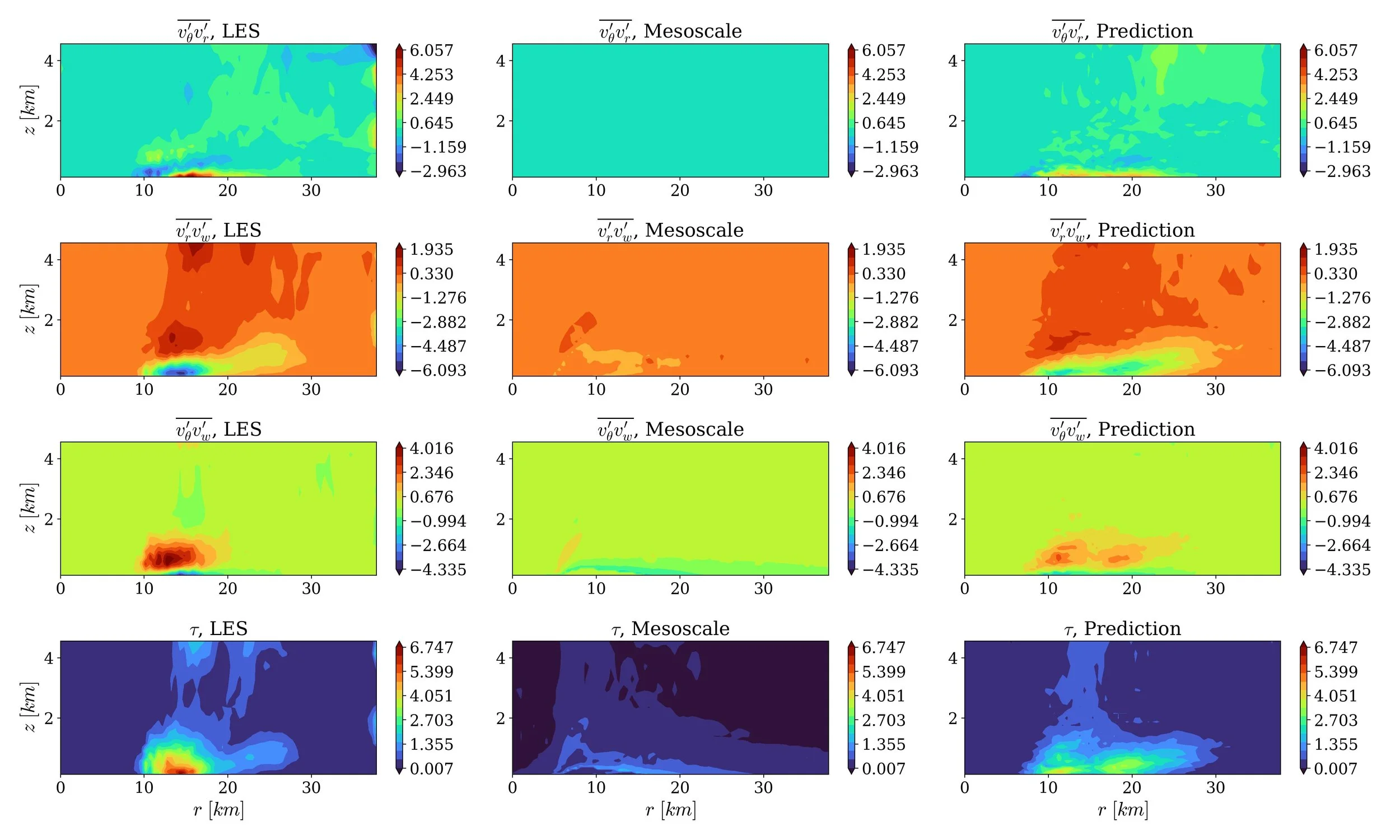
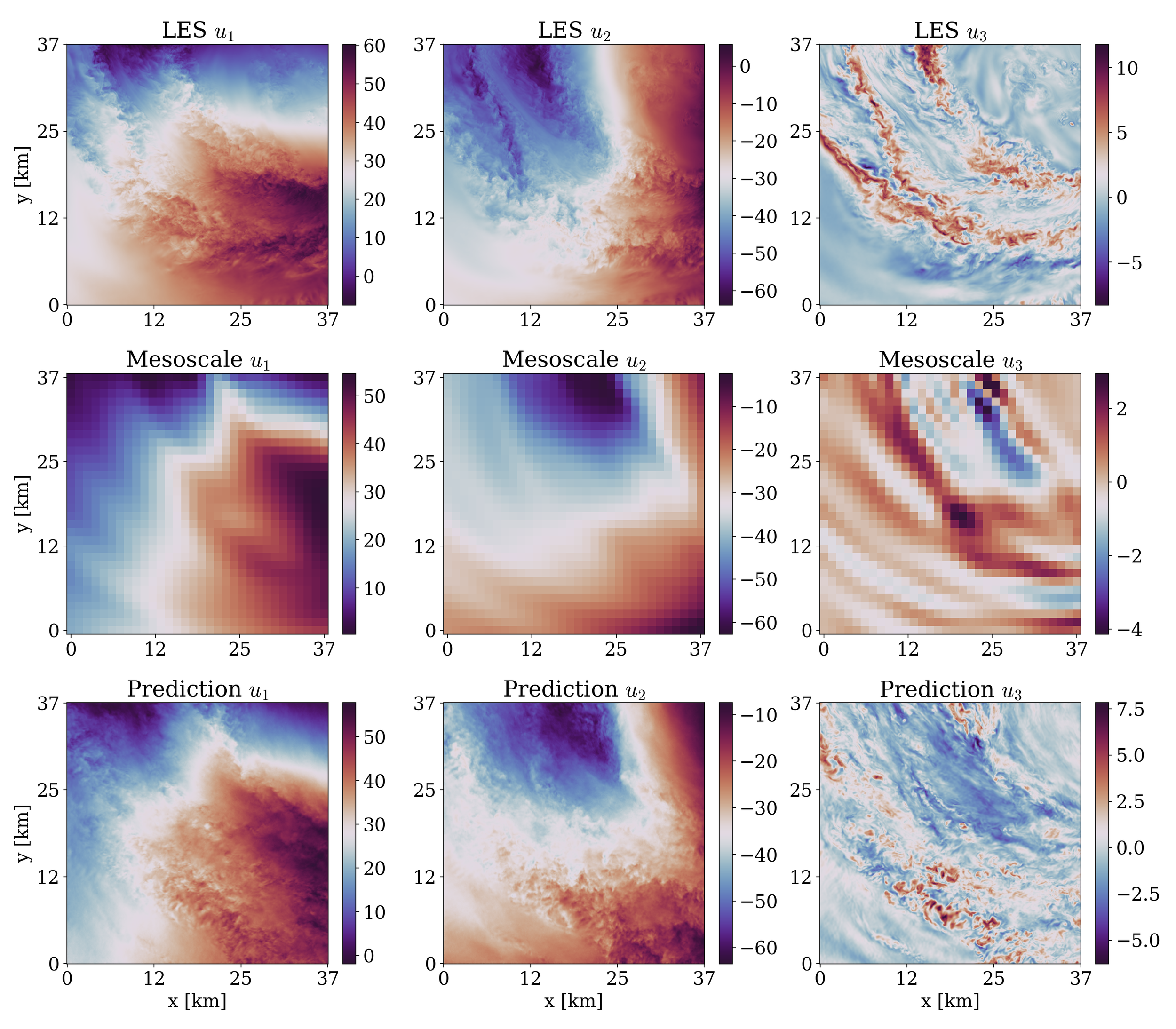
Tropical cyclones are among the most destructive environmental hazards worldwide, posing severe risks to offshore and coastal infrastructure due to the intense and highly chaotic turbulent stresses generated within their boundary layers. Accurate estimation of these turbulence-induced forces and stresses is essential for reliable structural design and risk assessment under extreme conditions. While high-fidelity numerical models such as large-eddy simulations (LES) based on the Weather Research and Forecasting (WRF) framework can resolve these processes with high accuracy, their computational cost makes them impractical for ensemble forecasting, sensitivity studies, or rapid evaluation across multiple storm intensities and design configurations.
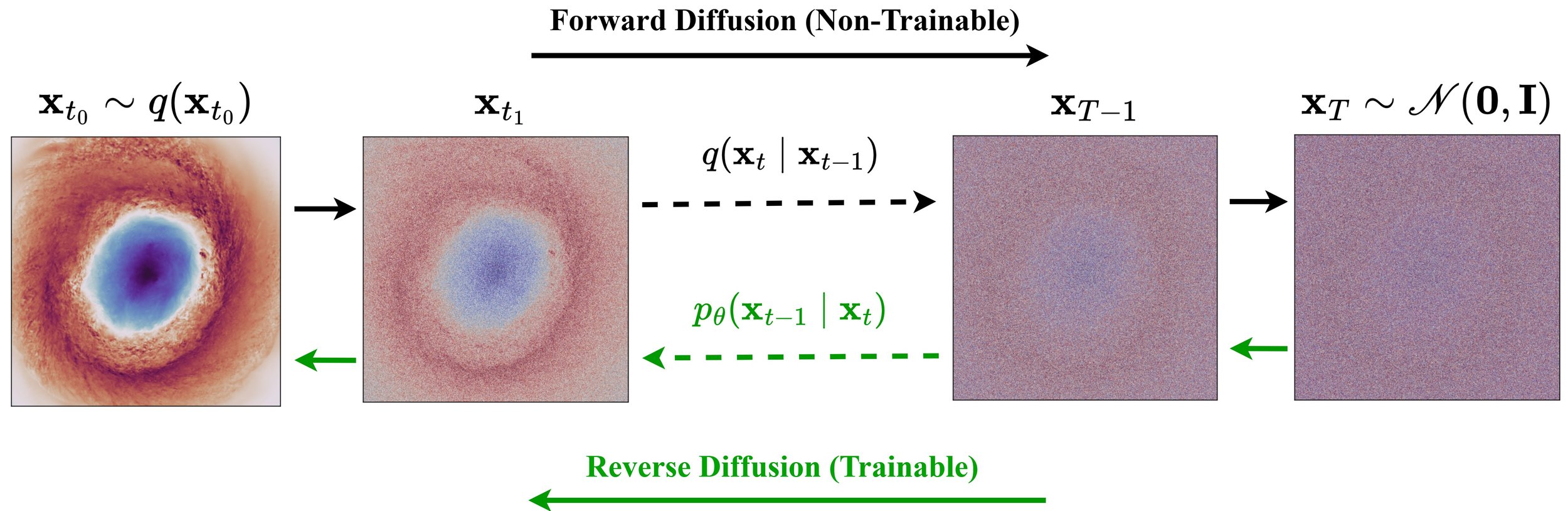
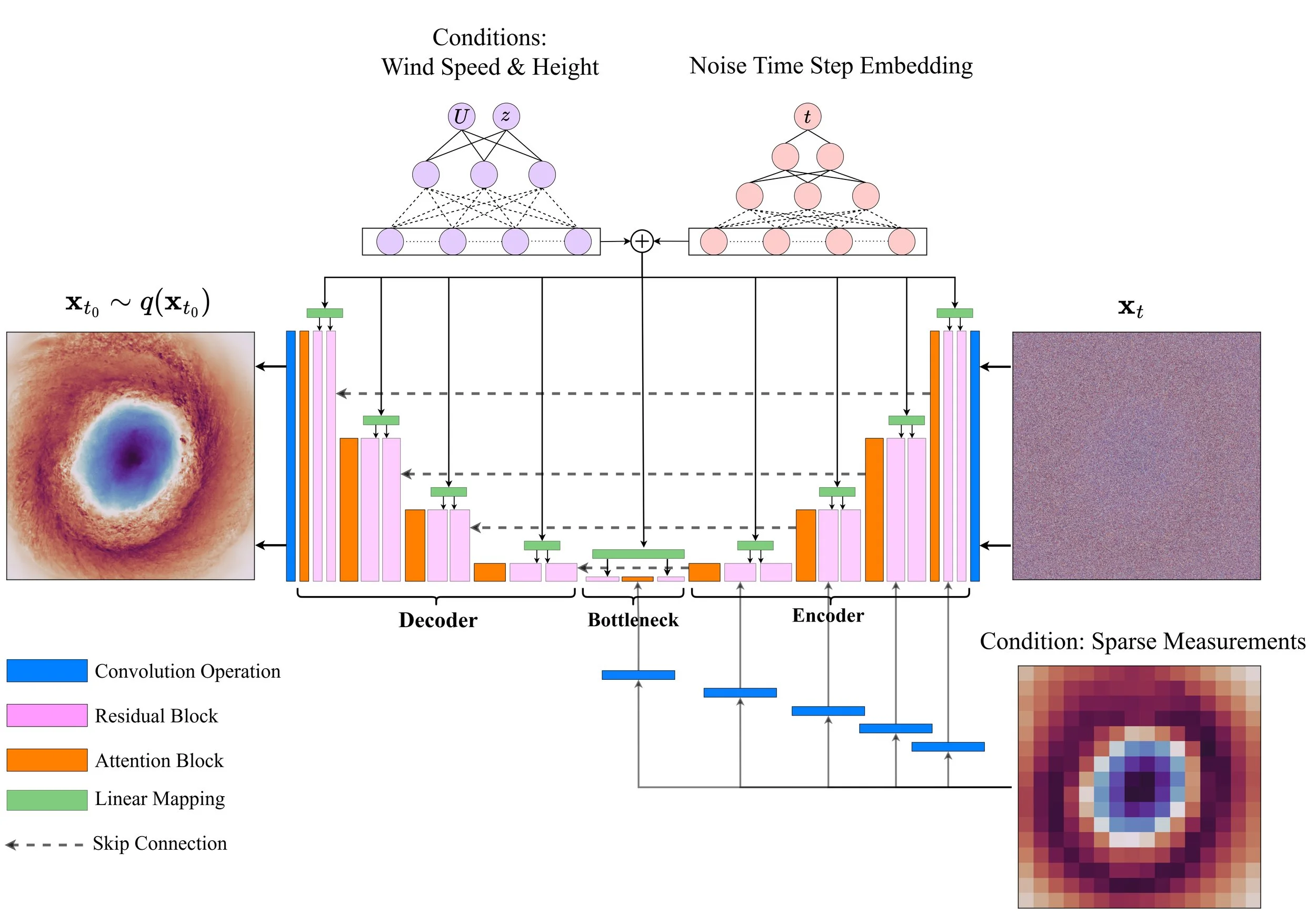
In this work, a conditional diffusion denoising probabilistic model (DDPM) is developed to perform super-resolution of mesoscale WRF tropical cyclone simulations at 1500 m resolution to LES-like fields at 55 m resolution, spanning multiple storm intensities defined by the Saffir–Simpson hurricane wind scale. The model successfully reconstructed key features of the chaotic turbulent flow field, including fine-scale velocity structures and associated turbulent stresses, while also recovering physically consistent vertical wind shear profiles characteristic of LES. These results demonstrate the potential of physics-informed generative machine learning models to enable rapid, high-fidelity assessment of extreme atmospheric flow hazards, supporting decision-making and risk mitigation without the prohibitive computational burden of traditional high-resolution simulations.
Generative AI for ABL Super Resolution
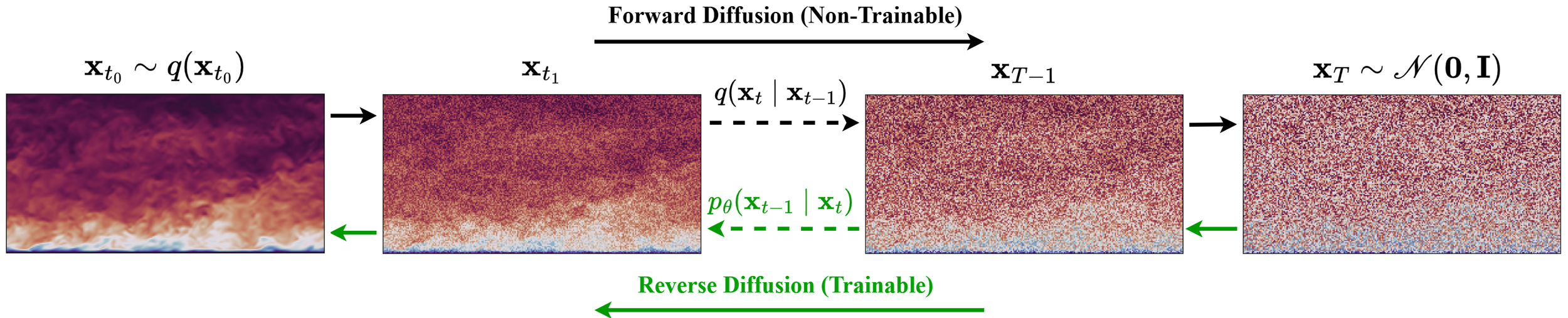
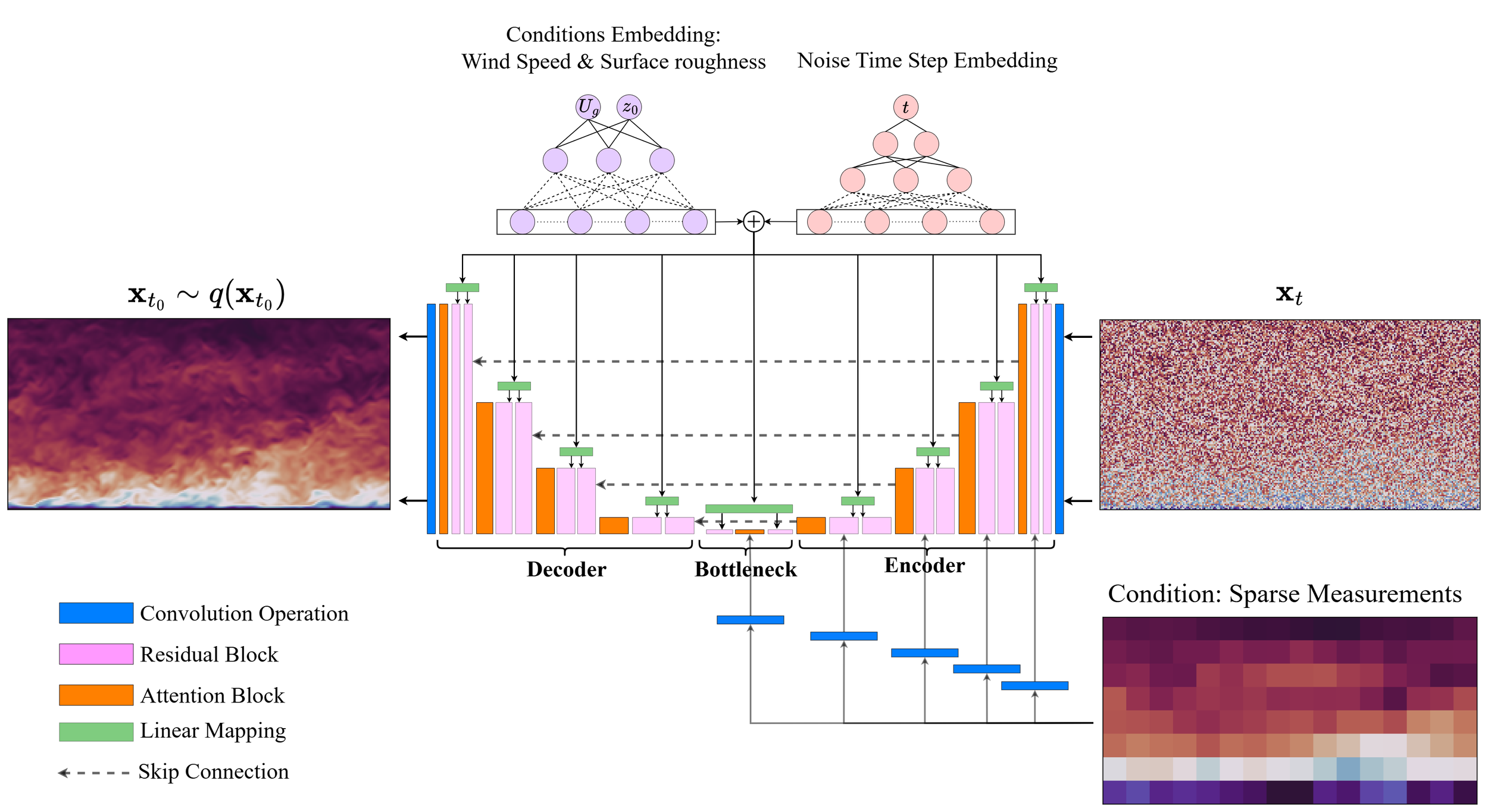
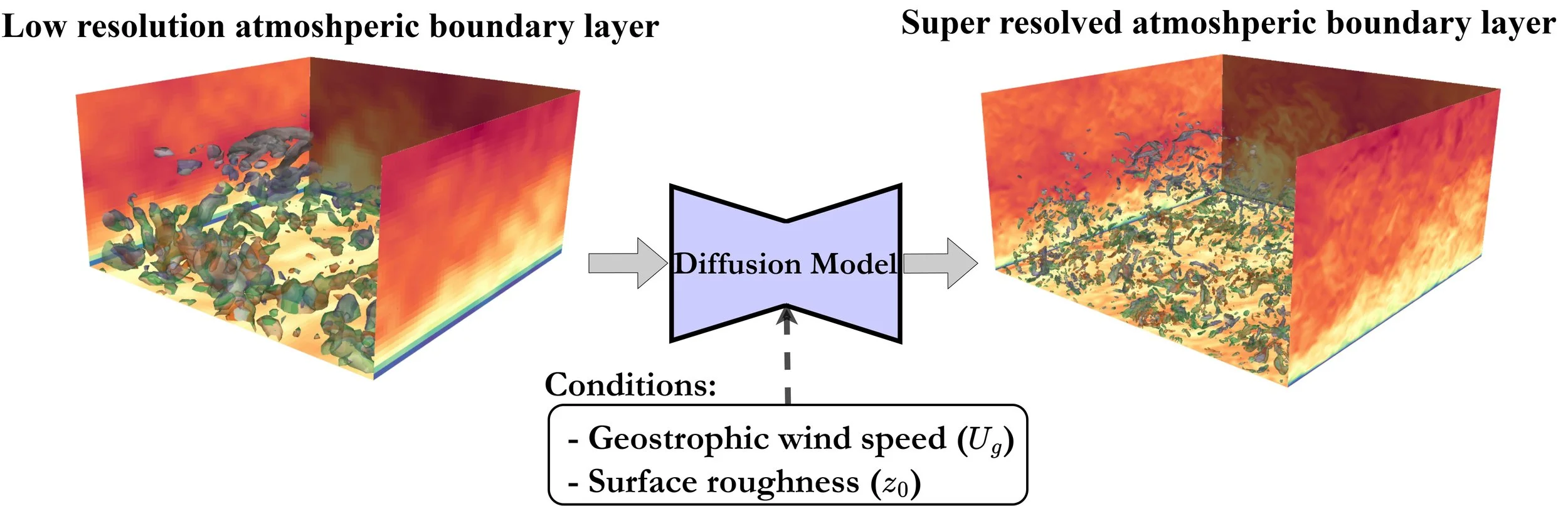
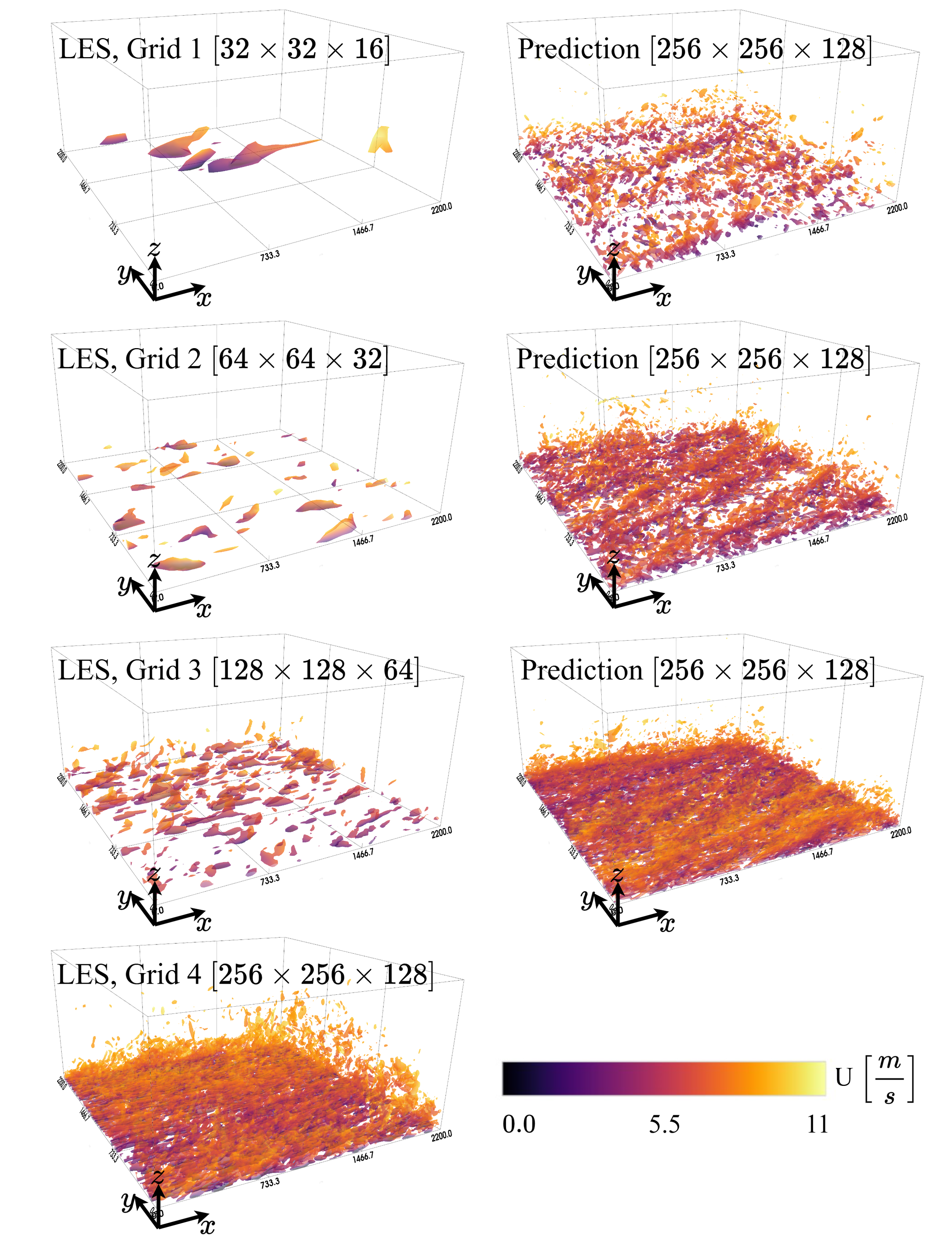
High-fidelity numerical simulations of the atmospheric boundary layer (ABL), particularly large-eddy simulations (LES), are critical for accurate estimation of turbulent wind stresses and fatigue loading on offshore structures such as wind turbines. Structural fatigue and lifetime performance are strongly correlated with turbulence characteristics of the incoming wind field, including shear profiles, turbulent stresses, and integral length scales of the mainstream flow. However, generating LES at sufficiently fine spatial resolution to resolve these features across multiple wind conditions and surface roughness scenarios is computationally expensive, limiting their use in design optimization, parametric studies, and uncertainty quantification. In contrast, lower-fidelity approaches such as Reynolds-averaged Navier–Stokes (RANS) models often underpredict turbulent stresses, leading to non-conservative estimates of fatigue loads on critical infrastructure.
In this study, a conditional diffusion denoising probabilistic model (DDPM) is developed to perform super-resolution of computationally feasible coarse-resolution ABL LES to higher-resolution LES fields. The training and evaluation data were generated using the high-order, massively parallel finite-difference solver XCompact3D, spanning multiple wind classes defined by IEC standards, a range of surface roughness coefficients, and grid resolutions from 68 m down to 8 m. The model demonstrated strong capability in reconstructing fine-scale turbulence statistics, including turbulent stresses, integral length scales, and energy spectra, consistent with high-resolution LES. Additionally, the results indicate that the model remains valid when the input resolution satisfies the Pope criterion threshold (approximately 0.8), providing a practical guideline for its application in ABL modeling workflows. This work supports the use of physics-informed generative models as a scalable alternative for high-fidelity wind-loading assessment in offshore wind energy applications.




The Development of a Control System for a Free Running High Speed Craft
To enable repeatable maneuvers in open-water free-running experiments, a dedicated scaled autonomy testing platform was designed and experimentally validated. Rather than integrating early-stage control algorithms directly onto larger experimental assets, a compact 50-inch twin-propeller unmanned surface vessel was developed to serve as a modular testbed for control scheme experimentation. The scaled platform allows iterative refinement of guidance and heading control strategies under realistic environmental conditions while minimizing operational risk and experimental cost. The scaled model incorporates a brushless motor coupled to a gearbox driving dual propeller shafts with servo- actuated steering systems. The model uses an electronic speed controller (ESC) in order to regulate throttle speeds and contains a closed loop water cooling system for the motor as well. The onboard data collection systems include an Arduino based microcontroller with an integrated inertial measurement unit (IMU) in order to capture roll, pitch, and yaw, a GPS receiver for position tracking, and wireless bluetooth capability for real-time data acquisition. The model has two types of control systems, one uses a radio controlled transmitter with a remote control and the other uses bluetooth and can be controlled by bluetooth via a mobile application. The developed architecture provides a structured foundation for future implementation and systematic evaluation of autonomous control strategies in open-water experimental platforms.
Fourier Features- Physics Informed Neural Networks
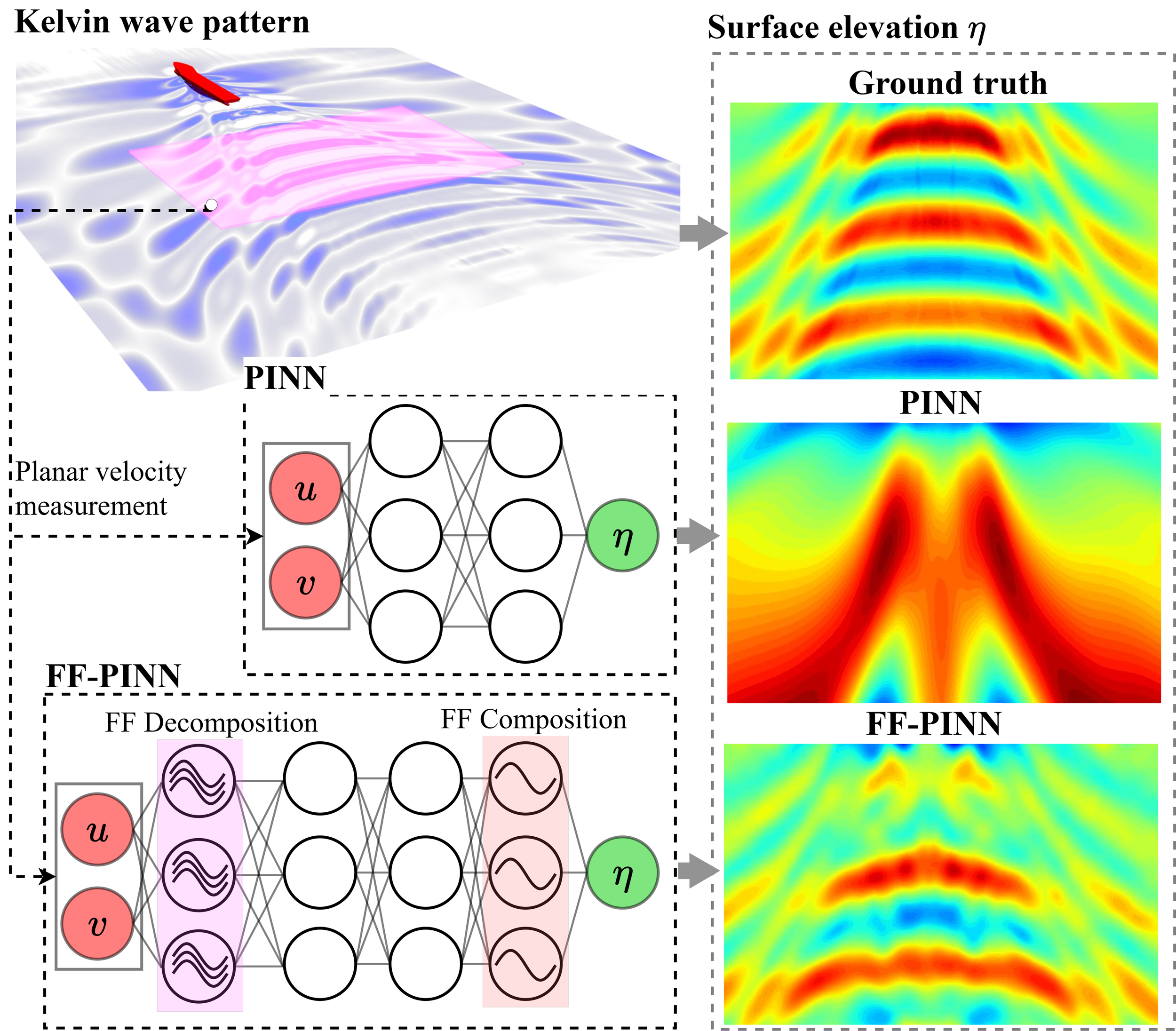
Neural networks are known to suffer from spectral bias, a well-documented tendency to learn low-frequency components of a signal more readily than high-frequency content, while convergence to fine-scale features is often slow or incomplete. This limitation directly affects physics-informed neural networks (PINNs) when used as surrogate solvers for fluid flow problems, where accurate representation of high-frequency structures, such as sharp gradients, vortical features, and wave dynamics, is essential for physical fidelity. As a result, standard PINN formulations may converge to overly smooth solutions that fail to capture the full spectral content of the underlying governing equations.
In this work, the use of Fourier feature embeddings to mitigate spectral bias in PINNs is investigated by decomposing input velocity fields into a broad band of sinusoidal basis functions prior to network training. This Fourier-feature PINN (FF-PINN) formulation enables the network to learn different frequency bands independently before recomposing them into physically consistent velocity and pressure fields at the output. The approach was evaluated on multiple benchmark problems, including inverse flow reconstruction around cylinder arrays and Kelvin wave pattern. The results demonstrate improved convergence to high-frequency flow components and significantly faster learning of the true solution compared to conventional PINN architectures. This study provides a practical pathway for enhancing the accuracy and robustness of physics-informed learning frameworks in multiscale fluid dynamics problems.
LES Super Resolution using Generative Residual Networks
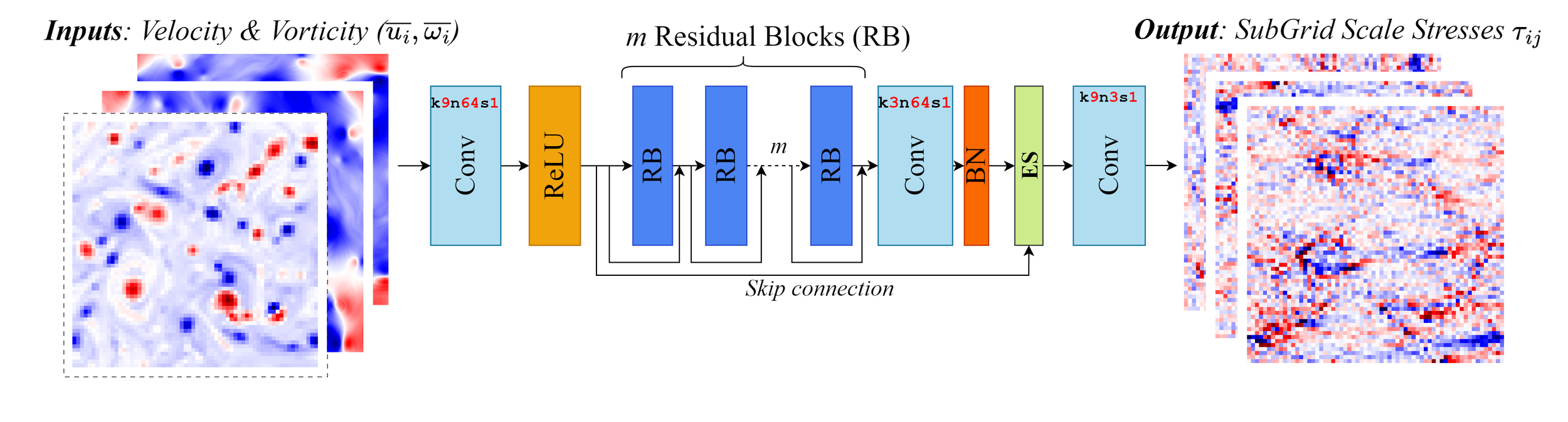
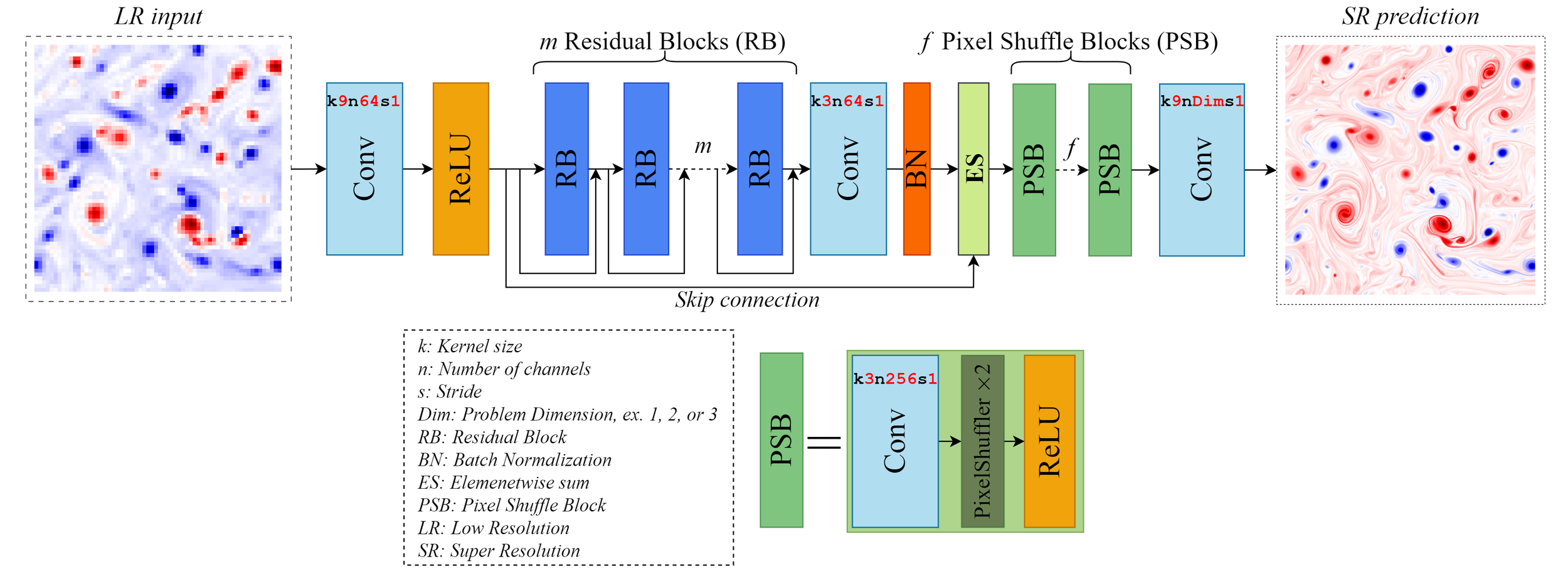
Although large-eddy simulation (LES) provides high-accuracy predictions for a wide range of turbulent flow problems, its computational cost remains prohibitive for many industrial and design-oriented applications. As a result, engineering practice continues to rely heavily on lower-fidelity approaches such as Reynolds-averaged Navier–Stokes (RANS) models, which often struggle to represent unsteady, multiscale turbulence dynamics. Bridging the gap between computational feasibility and physical fidelity remains a central challenge in turbulence modeling and simulation.
In this study, a generative dual-scale convolutional residual network is developed to perform super-resolution of coarse LES fields and estimate the subgrid-scale (SGS) stress tensor for closure modeling. The dual-scale architecture explicitly separates the learning of large-scale flow structures from fine-scale turbulent fluctuations, enabling more accurate reconstruction of high-frequency components compared to single-scale networks. The model was evaluated on two benchmark problems: jet flow injection across multiple configurations and Reynolds numbers, and isotropic turbulence decay. Across both cases, the dual-scale framework demonstrated improved performance in recovering fine-scale flow features and SGS stresses, highlighting its potential as a data-driven augmentation to traditional LES workflows.
ROM for Flexible Bodies Near Free Surface Flows
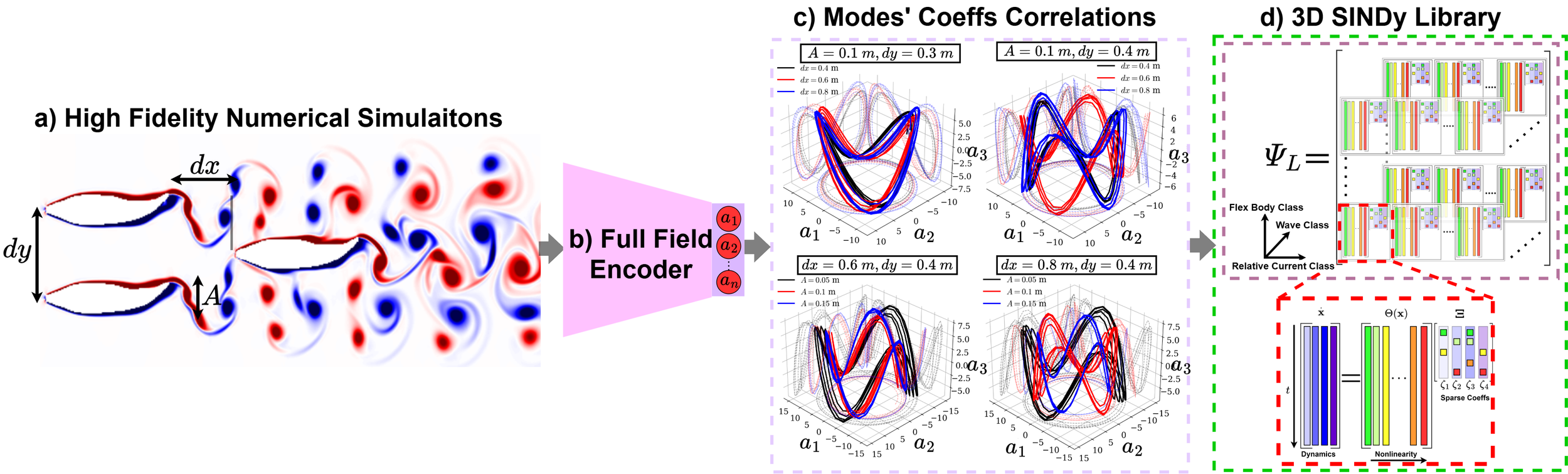
Real-time control of robotic systems operating in highly nonlinear and chaotic environments remains a significant challenge, particularly for bio-inspired underwater robots interacting with near free-surface flows. In such fluid–structure interaction environments, accurate prediction of hydrodynamic forces is essential for stable and efficient maneuvering, yet full-order numerical models are far too computationally expensive for real-time control. Model predictive control frameworks therefore require reduced-order representations that balance physical fidelity with strict computational constraints.
In this ongoing work, a nonlinear reduced-order model (ROM) for bio-mimetic robotic systems is being developed using the Sparse Identification of Nonlinear Dynamics (SINDy) framework constrained by Proper Orthogonal Decomposition (POD) modes. The approach leverages data-driven discovery of governing dynamics while preserving the dominant flow and structural modes relevant to near free-surface interactions. The resulting ROMs are designed to enable fast and robust real-time control suitable for model predictive control applications. This research aims to establish a scalable pathway toward closed-loop control of bio-inspired robots in complex flow environments, with planned extensions to experimental validation and hardware-in-the-loop testing.
Previous projects
Generative Model for Rapid-Response Assessment of Floating Structure
Iterative design and numerical simulation of floating offshore structures are often computationally intensive and time-consuming, particularly when exploring large design spaces involving multiple structural configurations and varying sea-state conditions. High-fidelity hydrodynamic and structural simulations provide accurate estimates of loads and responses but are poorly suited for rapid iteration within early-stage design workflows. This computational burden can significantly slow the design spiral, limiting the ability of engineers to efficiently evaluate alternative concepts and converge toward optimal solutions.
In this ongoing research, a generative machine learning framework is being developed to estimate hydrodynamic loadings and structural responses of semi-submersible floating offshore structures across a range of array configurations and sea-state conditions. The objective is to enable near–real-time performance assessment that complements, rather than replaces, high-fidelity simulations. By providing fast, physics-aware predictions during the conceptual design phase, this approach aims to support rapid screening of design options, accelerate convergence within the design spiral, and enhance decision-making for offshore engineers and practitioners.
Neural Implicit Flow for Wave Free Surface Compression
Finished 2024
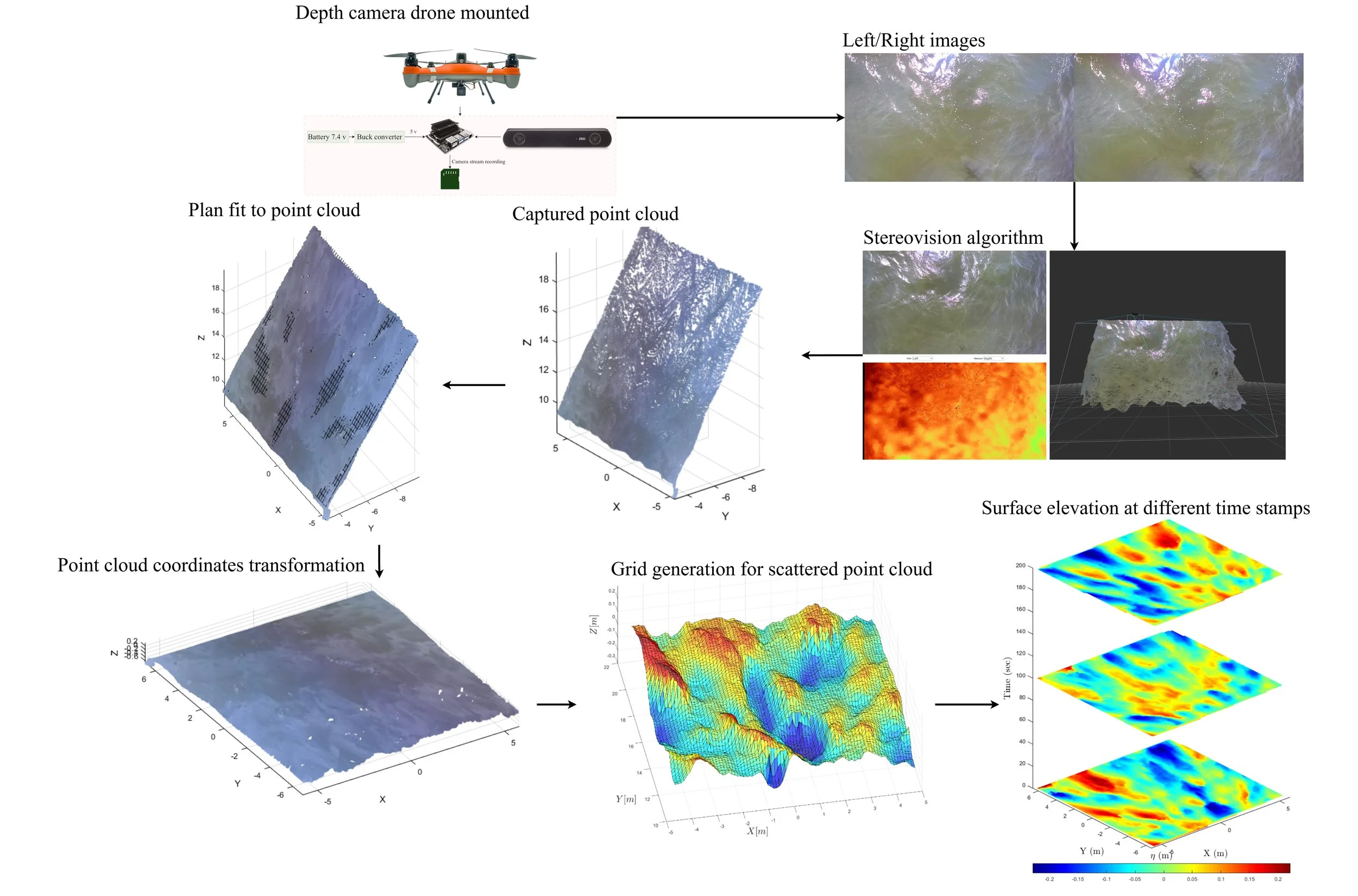
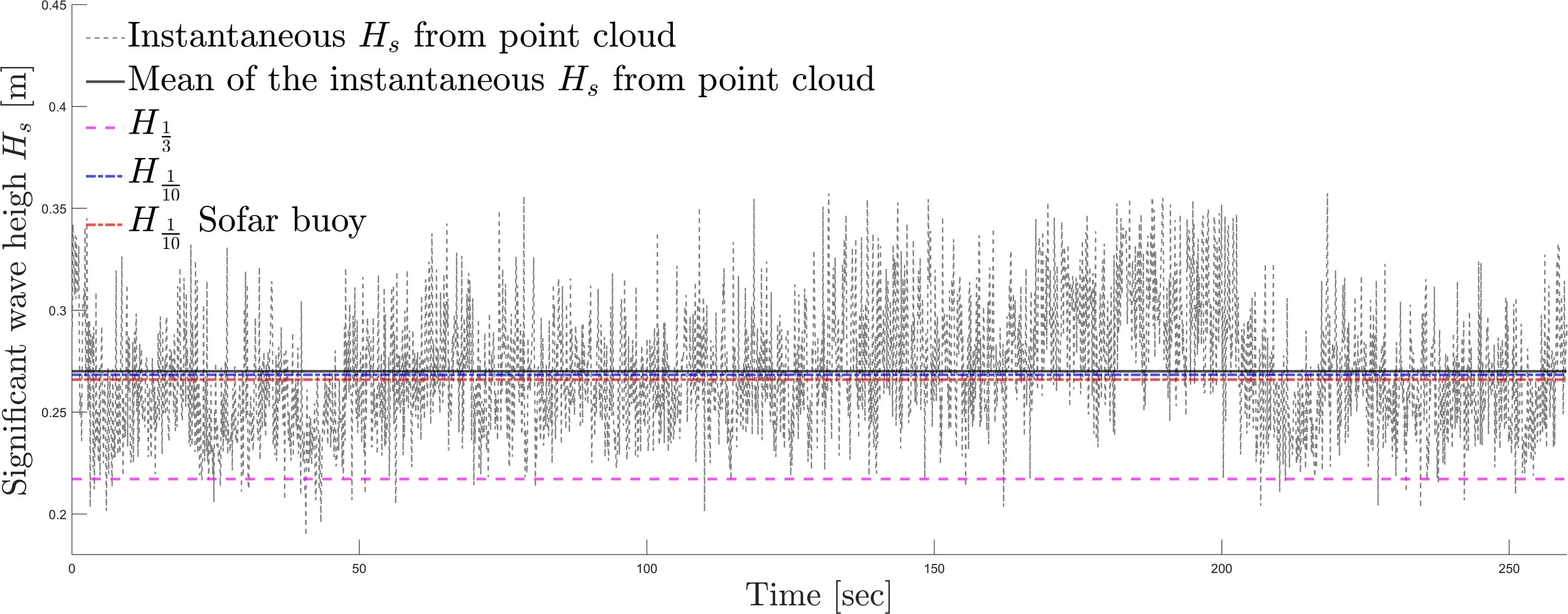
Training generative models directly on high-resolution physical data remains computationally prohibitive, even with recent advances in GPU hardware. This challenge is particularly acute for spatiotemporal datasets defined on nonuniform grids or point clouds, where conventional convolutional architectures are not naturally applicable. As a result, learning compact and physically meaningful latent representations is essential for enabling scalable generative modeling in experimental and simulation-based workflows.
In this work, a variational Neural Implicit Flow (NIF) is utilized and developed to compress experimentally measured free-surface wave elevation data obtained from stereovision cameras. The approach maps wave surface fields (128 × 128) into a highly compact latent space of dimension 14, with the latent variables sampled from a Gaussian distribution. Sparse measurements from the point cloud are used to condition the network, enabling generation and reconstruction of full surface elevation fields. The model demonstrated promising capability in reconstructing previously unseen wave surfaces, highlighting its potential for efficient generative modeling of free-surface dynamics. This framework provides a promising pathway toward data-efficient generation of wave fields and broader applications in generative computer-aided engineering (CAE).





Further Insight into the Hydrodynamic Phenomena Influencing Motions, Dynamics Loads and Performance of High Speed Craft in a Seaway
Finished 2024
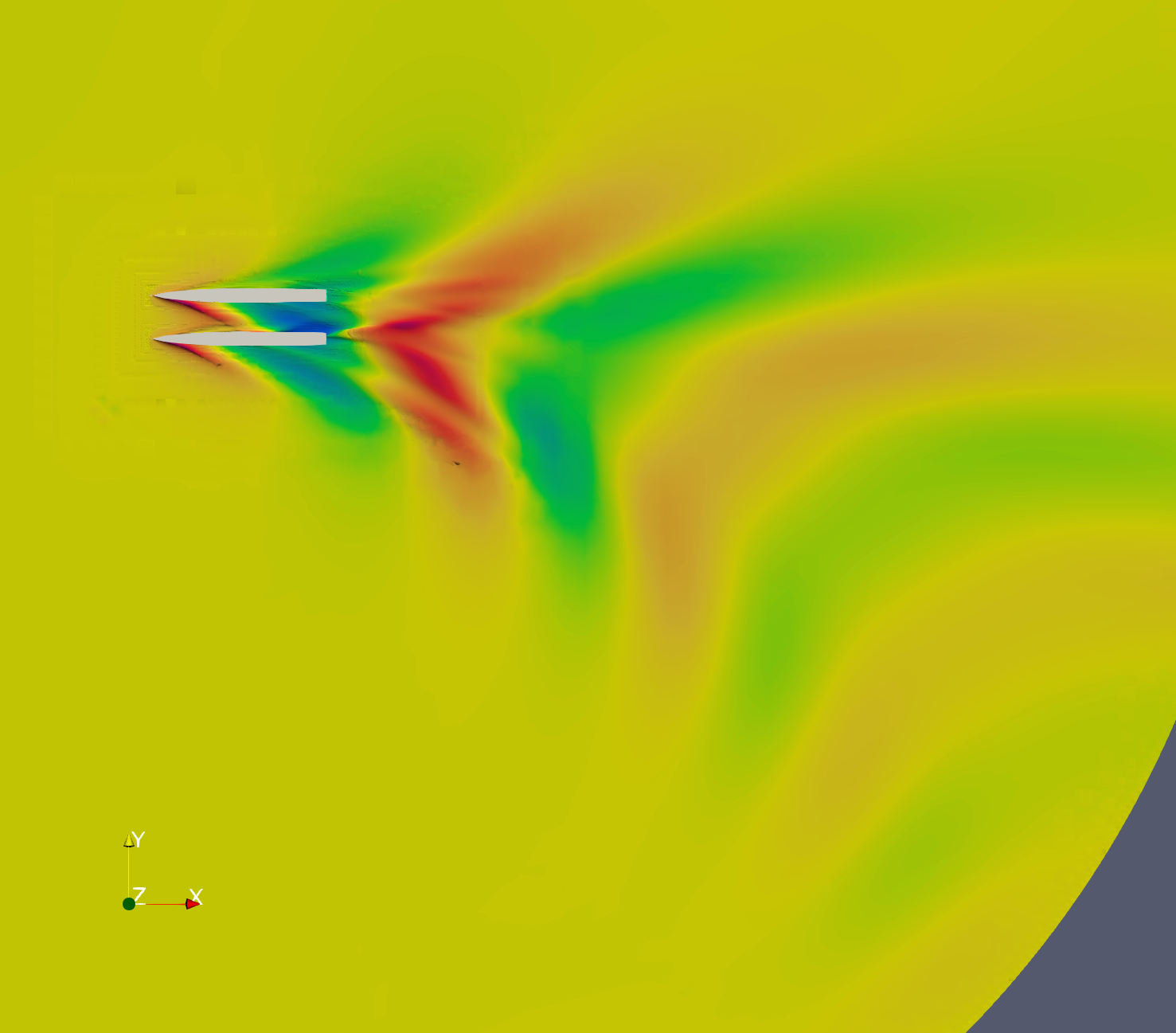
The flow field around a High-Speed Craft (HSC) is complicated; the hull acts as a lifting surface causing unique flow phenomena and loads. The main hydrodynamic engineering challenges for HSC are to increase the performance, decrease accelerations, and decrease damaging slamming forces. These challenges are commonly addressed through either experimental methods (towing tank testing) or empirical/analytical and numerical models. Empirical methods have limitations in their accuracy, and numerical models for HSC are not yet as accurate as their counterparts for displacement hulls. The reason is that many of the physical phenomena related to planing craft, are not yet fully understood.
In this project, model scale free running testing will be used to shed light on some key flow mechanisms underlying the hydrodynamics associated with High Speed Craft advancing in calm water and rough seas. The target phenomena have been chosen based on identified knowledge gaps, the closing of which is required to further develop numerical models to a higher degree of applicability to HSC. This project will investigate how flow separation effects calm water resistance, running position, added resistance and acceleration in waves but also how slamming and global bending moment relates to hull rigidity.
We have previously found that forcing separation to happen using spray deflectors/rails can improve calm water performance but that the location and shape of the spray deflectors is paramount. For optimal detachment, correct determination of the stagnation line is required. This is, however, something current state of the art numerical and semi-empirical methods struggle to predict. Accelerations and slamming forces are important measurements of vessel performance in waves and accurate predictions of head seas performance will aid in reducing structural weight. Slamming loads are difficult to capture due to their transient behavior; to understand how they affect the hull structure, a segmented backbone beam hull will be tested to quantify global bending moment and local slamming pressure. Comparing the results to a rigid hull fitted with pressure sensors will give insights into the role hull rigidity plays for performance of HSC in rough seas. All datasets will be readily available to the scientific and boat building communities for rapid dissemination of the gained knowledge.
In conclusion, the project will contribute to both better design of HSC and a better understanding of the fundamental flow physics around such craft, while also creating validation data sets to further enhance the development of hydrodynamics and fluid-structure interaction models. Ultimately, this project will provide the Navy, numerous private sector stakeholders, and the research community with an improved understanding of factors that affect performance, safety, seaworthiness, and structural integrity of HSC.
Current and tidal Foil Turbines
Finished 2024


There is currently a huge demand for clean, reliable and sustainable energy; flowing fluid can potentially generate this clean power. Both industrial and academic groups worldwide are working to improve traditional offshore wind, tidal and oceanic turbines.
The aim of this research is to evaluate the performance and increase the efficiency of current- and tidal wave energy harvesters with a specific focus on a flapping foil hydrokinetic turbine in swing arm mode. The more commonly used rotary turbines are efficient during continuous smooth attached flow over the blades. However, oscillating foil turbines generate a very large leading-edge vortex that separates the flow early causing high instantaneous forces. As a result, they create higher lift force than conventional turbines. This type of design is used by bees to generate lift. Bees have small wings compared to their body. It is also used by fish who need extra propulsion- or maneuvering power. Furthermore, foil turbines can be placed in shallower areas and are less hostile to marine wildlife.
Wave Energy Harvesting
Finished 2021

The project aims to evaluate the performance and power extraction of the wave energy converter (WaveStar) at various sea sates. Computational fluid dynamics simulation (CFD) is used to assess the device performance using the OpenFOAM open source CFD toolbox. Further studies are implemented to compare between different CFD techniques to predict the dynamic behavior of the device. The model will be extended to study design optimization of wave energy farm array configuration and mooring system for coupled and uncoupled wave energy converters for energy efficiency maximization.
Increased performance of high speed craft
Finished 2020


High Speed Craft have received widespread applications in recreational use as well as in military and search and rescue operations. Although it is a matured technology, there is a lack of experimental data for variations in hull forms and efforts are continuously being made to improve their efficiency, safety and maximum speed. This project aims to evaluate spray deflection technologies - spray rails and spray deflectors - in model scale using towing tank testing.
Using small tapered steps, the flow is detached and redirected to reduce the spray area, over all resistance reduction has been found in calm water but current wave tests are inconclusive.
Offshore Seaweed Farming
Finished 2020

Food shortage is one of the biggest challenges facing humanity in the 21st century. Currently, 1 in 9 people (821 million) are malnourished. By 2050 the world's population is expected to reach 9 billion. To lift people out of poverty and into the middle class, the availability of affordable, healthy and sustainable food is paramount. Thus the pressure to increase farmland or crop yields is enormous. The UN is calling for an increase in food production of 70% by 2050.
This projects aims to design and develop a sustainable, offshore farming system. There is a market need for bigger and better ocean farming systems to help mitigate the climate crisis as well as provide an alternative food source for humans. This project is run in conjunction with the University of Southampton.
Added Mass Effects
Finished 2020

Marine growth can have significant effects on the motions of large floating platforms. For seaweed farms, the mass added by additional growth represents a large percentage change in total mass. The effect of this change can have repercussions for the feasibility and reliability of small floating seaweed farms in terms of seakeeping and power generation.
This project will further investigate and model the response of moored ocean farm arrays in various configurations over a harvest or growth cycle. The work involves modelling of the system dynamics and experimental validation.
Wave energy Harvesting
Finished 2020
Developing offshore ocean farms has huge potential. However, providing power to continuously monitor and operate a remote, unmanned or autonomous offshore farm, is a challenge. This project, working towards the goal of realizing renewable, sustainable and self-sufficient ocean farming practices, will investigate the use of wave energy harvesting to provide power. The aim is to determine the recoverable power from a moored array configuration over a range of conditions, through the application of multiple wave energy harvesters to exploit the loads on the mooring and interconnecting lines. The project is anticipated to involve modelling of the system dynamics and experimental validation.
2050 Sustainable food vision (website)
Finished 2020
We are partaking in the Rockefeller Foundation: Food System Vision Prize 2050
Autonomous Aquaculture: Changing how seaweed is grown and eaten.
We want to provide food to and change the eating habits of hungry crowds of New Yorkers by autonomously growing seaweed in the local offshore area.
2019/2018 Senior Design Project (Website)
Finished 2018

CAD model of 2020 prototype
Stevens Senior Design teams have worked to develop working farm prototypes for two years. Currently, the team is in the design phase with prototype testing to start in the spring of 2020.
2018/2019 Senior Design Project (WebsitE)
Finished 2019

Prototype testing spring 2019
A proof of concept a prototype has been developed; containing a data monitoring system that will measure temperature, pressure, and weight of seaweed to ensure ideal growing conditions. Initial testing in the Davidson Laboratory Towing Tank took place during the spring of 2019.
FPSO Downtime ANALYSIS
Finished 2022

Example of an FPSO with a turret mooring system

Model FPSO in Davidson Laboratory Towing Tank at Stevens Institute of Technology
Despite continuous developments in the use of alternative sources of energy such as solar, nuclear power, biomass, etc., hydrocarbon is still the most important fuel in today’s world. The Organization for Economic Cooperation Development (OECD) predicts continuous increase in the value of hydrocarbons in the coming years, and this implies that Floating Production Storage and Offloading vessel (FPSO’s) operations in ultra deepwater locations will continue to be relevant for a very long time. The major challenge faced by FPSO operations is extreme weather conditions which may prevent offloading operations and sometimes cause the FPSO to cut back on production.
This research aims to analyze the effects of weather downtime on FPSO operations by using existing global wave data, evaluate motions of FPSOs and shuttle tankers under scatter environment, improve FPSO operations by providing workability and downtime for FPSO based on local wave statistics. The ultimate goal of this research is to provide improvements to FPSO design that will eliminate or minimize the effect of waiting on weather to ensure continuous production and save cost.
Design OF Autonomous Sailing Vessels
Finished 2020


The design of autonomous vessels is associated with unique opportunities and challenges. As naval architects, we rely on 10,000+ years of collective experience in the design of manned boats. However, with the emergence of unmanned surface vessels, there may be benefits in modifying early design phase procedures, as these vessels will have fundamentally different needs.
There is a growing need for ocean based sensing in remote areas not accessible to most researches. With the opening of arctic waters and the changing weather patterns all over the globe, reaching new destinations to carry out research observations has become vital. The realization of an energy independent autonomous surface vessel, to act as a mobile research tool, has been targeted by the Maritime Robotics Laboratory at KTH.
Our lab in conjunction with the Design SPACE lab at Stevens Institute of Technology presents a new approach to system optimization aimed at autonomous vessels, using the Maribot Vane small-scale autonomous surface vessel as a case study, with the aim of (together with KTH) devlop a second generation of the vessel. A multidisciplinary, multiobjective, reliability-based design optimization (RBDO) problem was formulated for the conceptual design of the Maribot Vane, seeking to minimize the system cost and the probability of failure under anticipated operational conditions. The results will inform designers of such a ship platform about the trade-offs between cost and reliability, as well as the optimal selection of main particulars for the detailed design stage and finalization of the hull design.
ship health monitoring
Finished 2020

Every year a large number of ships sink due to structural failure. Ship Health Monitoring is a research project that aims to significantly reduce this number. Big data, AI and Machine Learning have opened up new possibilities for Smart applications in other fields such as Smart cars, Smart cities and Smart appliances. Shipping must soon follow.
By monitoring the structural health of a ship, fatigue cracks can be detected at a very early stage of their initiation and failure can be avoided. In order to cover a large structure such as a ship, a considerable number of sensors are needed and a long term monitoring of the structure is required. Accordingly, the interpretation of such a big dataset to uncover information about the health condition of the ship structure is challenging. For this, basic sensing technologies are used to allow focus on the development of state-of-the-art data analysis techniques.
This project is carried out together with Dr Belanger in the School of Business and Dr Williams in Mechanical Engineering Department.





Numerical modeling is combined with testing in the Davidson Laboratory towing tank to develop a Smart Personal Flotation Device (Life Vest.) The Smart PFD project has involved 12 students over the past three years. Currently, PFD models on the market suffer from accidental activation and perceived bulkiness causing users not to wear their vests. Current development focuses on optimizing staggering deployment of the individual air bladders with the goal to reduce time to “face up” and time to surface. A radar reflector is also being added to increase the chances of location. This project is carried out in collaboration with the Wearable Robotics Lab.
Big Data analytics in shipping
Finished 2018


The evolution towards “smart” vehicles, including ships, is well under way. It is driven by the promise of many valuable applications, but made possible, in large part, by the revolutions in technologies such as Big Data, Machine Learning, and Artificial Intelligence. We are a few decades into the production application of Big Data in industries such as Telecom, Finance, and Media; and nearly a decade into advanced development in areas such as Healthcare, Autonomous Vehicles, and Smart Grids. Shipping involves some unique challenges in networking, analytics, and implementation, but some of the fundamental tasks will be similar. We focus on the issue of Big Data, and on the essential role of understanding the data that exists, the data that will be needed, and, through careful metadata creation and management, the fitness of that data in terms of properties such as: quality, latency, structure, volume/velocity, provenance, and others. This project is carried out in collaboration with the School of Business; David Belanger.
Dissipative Potential Flow Modeling
Finished 2015

Wave pattern no damping

Wave pattern with damping
Steady ship motion in calm water is a classical problem in ship hydrodynamics. Potential flow modelling is a common method to predict the wave making resistance of ships. In its conventional form, the flow is assumed to be free from damping due to the inviscid assumption of potential flow. It has been argued by the founding fathers of ship resistance predictions that damping plays an important role in determining the wave making resistance. Despite this, viscosity is often omitted from present wave making resistance prediction methods. It is known that damping plays an important role in the formation of the wave pattern and it is therefore of interest to determine the effect on the resistance prediction by including a damping factor in a previously undampened model.